Mexanizmlarni tuzilishi bo’yicha tahlil qilish
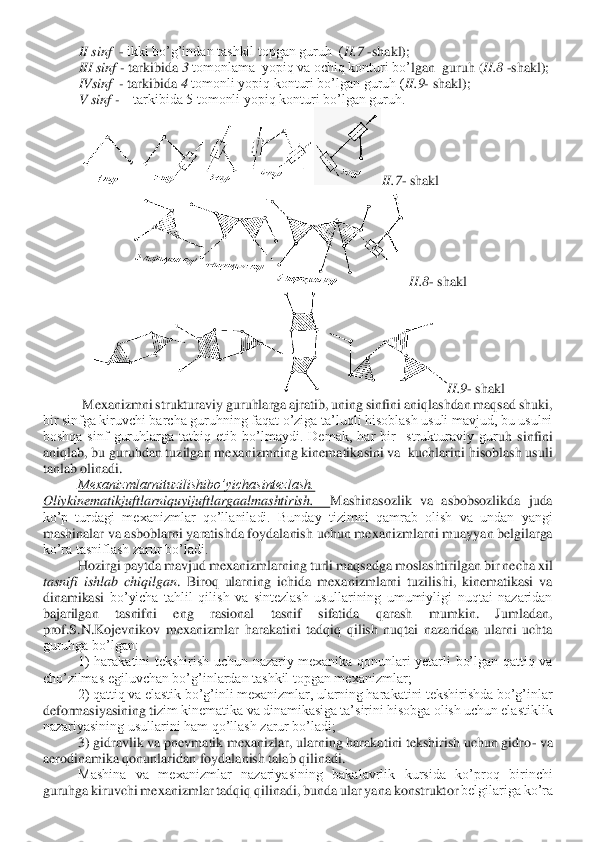



2- mavzu. MEXANIZMLARNI TUZILISHI BO’YICHA TAHLIL, TASNIFLASH VA LOYIHALASH Reja : 1. Mexanizmlarning asosiy elementlari va qismlari. 2. Kinematik zanjirlar va mexanizmlarning tuzilish formulalari. 3. Mexanizmlar hosil qilishning asosiy prinsipi, Assur tuzuvchi guruhlari: ularning tuzilish sharti va tasnifi. 4. Mexanizmlarni tuzilishi bo’yicha sintezlash. Oliy kinematik juftlarni quyi juftlarga almashtirish. Adabiyotlar: 1. Yuldoshbekov S.A. Mexanizm va mashinalar nazariyasi. – T.:2006. 2. Djurayev A. va boshq. Mexanizm va mashinalar nazariyasi. -T.: O’qituvchi, 2004. 3. Usmonxo’jayev X..X Mashina va mexanizmlar nazariyasi.Toshkent:O’qituvchi, 1981. 4. Frolov K.V. Mashina va mexanizmlar nazariyasi. – T.: O’qituvchi, 1990. Tayanch iboralar: Mexanizm, bo’g’in, ichki yonuv dvigateli, porshen, silindr, tirsakli val, kinematik juftlik, juftlik elementlari, chiqish bo’g’ini, kirish bo’g’ini, tuzilish sxemasi, kinematik sxema, shartli belgilar qo’yi kinematik juftlik, oliy kinematik juftlik, erkinlik darajasi, aylanma juftlik, ilgarilanma juftlik, silindrsimon juftlik. Mexanizmlarning asosiy elementlari va qismlari. Ma’lumki, mashina mexanizmlardan tashkil topadi, mexanizm esa bo’g’in (bo’g’in)lardan tashkil topgan bo’ladi. Bir yoki necha jism harakatini boshqa jismlarning aniq qonuniyatga amal qiluvchi harakatiga aylantirib beruvchi ko’rilma mexanizm deb ataladi. Yagona detal yoki bir necha det alning o’zaro qo’zg’almas birikmasi yoki mexanizmni tashkil qiladigan qattiq jismlar bo’g’inlar deyiladi. Bunda mutlaqo qattiq jismlar ham, deformasiyalanadigan hamda egiluvchan jismlar ham nazarda tutiladi. Mexanizmlar nazariyasida suyuqlik va gazlar bo’ g’inlar hisoblanmaydi. Bo’g’in yo yagona detaldan, yoki bitta kinematik o’zgarmas sistemaga birlashtirilgan bir qancha detallardan iborat bo’lishi mumkin. Bo’g’inlar konstruktiv alomatlariga ko’ra ( tirsakli val, shatun, porshen, tishli g’ildirak va hokaz o) hamda harakatlanish turiga ko’ra farq qiladi. Masalan, qo’zg’almas o’q atrofida aylanadigan bo’g’in krivoship deb, to’la aylanmaydigani koromislo deb, to’g’ri chiziqli ilgarilama harakatlanadigani esa polzun deb ataladi va hokazo. Mexanizmning harakatla nmaydigan bo’g’ini qisqa qilib qo’zg’almas bo’g’in (ustun, stoyka) deyiladi. Transport mashinalari, xususan, uchish apparatlari uchun stoykaning qo’zg’almasligi tushunchasi shartlidir, negaki bu xollarda stoykaning o’zi harakatda bo’ladi. Bo’g’inlar o’zar o kinematik juftlar orqali bog’langan bo’ladi. Kinematik juft deb, ikki bo’g’inning o’zaro nisbiy harakatiga imkon beradigan bog’lanishga aytiladi. Bog’lanish elementlari sirt (yuza), chiziq va nuqta bo’lishi mumkin. Juftlikning elementlari doimo o’zaro urungan holatda bo’lishi uchun juftlik geometrik tarzda (bo’g’inlarning shakli
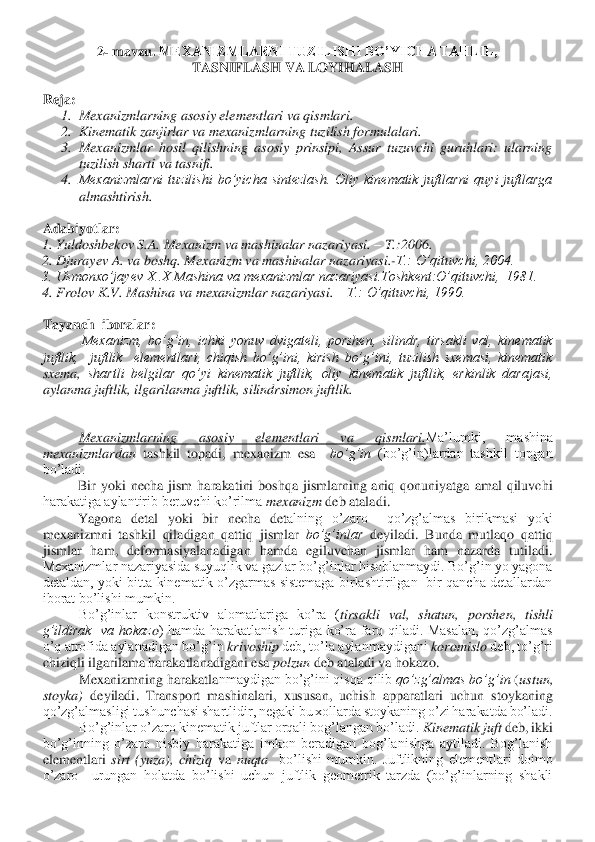
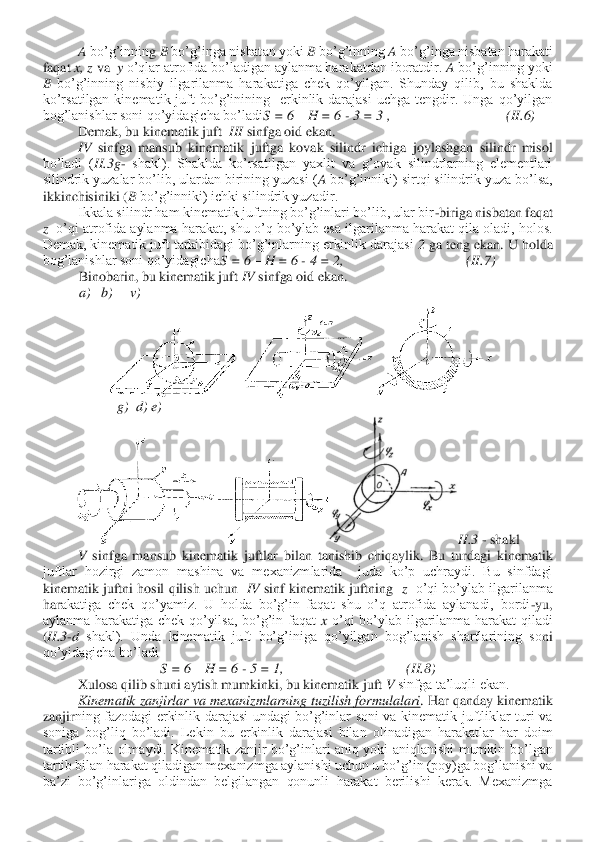
hisobiga) yoki kuch (og’irlik kuchi, prujina, suyuqlik yoki gazning bosim kuchi va hokazo) ta’sirida tutashtirilgan bo’lishi kerak. Kinematik juftlik mashinalarning ishiga yar oqliligini va ishonchli ishlashini ko’p jihatdan ta’minlaydi. Chunki ular orqali bir bo’g’indan boshqasiga kuchlar uzatiladi, nisbiy harakat natijasida kinematik juftliklarda ishqalanish vujudga keladi, juftlikning elementlari zo’rikish holatida va yeyili sh jarayonida bo’ladi. Shu sababli kinematik juftlik turini, geometrik shaklini, o’lchamlarini, konstruksion va moylovchi materiallarni to’g’ri tanlash mashinani loyihalashda katta ahamiyatiga ega. Bo’g’inlarning kinematik juftlar orqali bog’langan guruhsi kinematik zanjir deyiladi. Kinematik zanjirlar oddiy va murakkab, ochiq yoki yopiq bo’lishi mumkin. Oddiy kinematik zanjirda har bir bo’g’in ikkitadan ortiq kinematik juft hosil qila olmaydi. Murakkab kinematik zanjirda ikkitadan ortiq kinematik juft ho sil qila oladigan bo’g’in bo’ladi. Ochiq kinematik zanjirda shunday bo’g’in borki, u faqat bitta kinematik juft hosil qilgan bo’ladi. Yopiq kinematik zanjirda esa ikkitadan kam kinematik juft hosil qilgan bo’g’in bo’lmaydi. Mexanizmning yopiq kinematik z anjirning xususiy ko’rinishi deb qarash mumkin. Chunki unda bo’g’inlarning biri qo’zg’almas qilib qotirilgan bo’ladi. Kinematik zanjir tushunchasidan foydalanib mexanizmga ta’rif beramiz - mexanizm shunday kinematik zanjirki, undagi bir yoki bir necha bo’ g’inga harakat berilganda qolgan bo’g’inlar aniq harakat qiladi. Mexanizm muljallangan harakatni sodir qiluvchi bo’g’in chiqish bo’g’ini, berilgan harakatni mexanizm chiqish bo’g’inining talab qilingan harakatiga aylantiradigan bo’g’ini kirish bo’g’ini deyiladi. Mexanizm chizmada tasvirlashda uning tuzilish sxemasi vakinematik sxemasi farq qilinadi. Tuzilishi (struktura) sxemasida bo’g’in va juftliklarning shartli belgilari qo’llaniladi (bo’g’inlar o’lchamlari ko’rsatilmaydi); kinematik sxemada kinematik hisoblash uchun zarur bo’ladigan o’lchamlari ko’rsatiladi. Sxemalarda bo’g’inlar r aqamlar bilan, juftliklar va bo’g’inlarning turli nuqtalari esa harflar bilan belgilanadi. Bo’g’inlarning kinematik juft bo’lib bog’lanish imkonlari turlichadir. Masalan, II.3 - shaklda aylanma harakatlanuvchi kinematik juft ko’rsatilgan. Bu yerda 1 va 2- bo’g’inlarning birikishi ikki silindr orqali hosil bo’lgan bo’lib, ular doimo bir -birlariga tegib turishadi. II.1 - shaklda A va B bo’g’inlarning boshqa bog’lanishi ko’rsatilgan. Bu kinematik juft bo’g’inlarni bir -biriga nisbatan dumalashiga va siljishiga imkon beradi. Bu holatda ikki bo’g’in x - x o’qi bo’ylab yo’nalgan to’g’ri chiziqda bir -biriga tegib turadi. Ko’rinib turibdiki , kinematik juft tarkibiga kiruvchi bo’g’inlarning nisbiy harakatiga ma’lum darajada cheklanishlar qo’yiladi. Ana shu kinematik juft tarkibiga kirgan bo’g’inlarning nisbiy harakatiga qo’yilgan chek kinematik juftlardagi bog’lanish shartlari deb ataladi. Qo ’yida kinematik juftliklarga, ularning tuzilish sxemalarida shartli tasvirlanishi va belgilanishiga bir necha misol keltirilgan. Aylanma juftlik (II.1 -a shakl) - qo’zg’aluvchanligi bitta bo’lgan juftlik; bo’g’inlari o’z o’qi atrofida faqat nisbiy aylanma harakat qiladi (strelka bilan ko’rsatilgan); bo’g’inlar 1, 2 silindrisimon yuzasi orqali o’zaro urinadi: demak, bu geometrik yopik tarzdagi qo’yi juftlikdir. Murakkabroq konstruksiya - sharikli podshipnik ham ana shunday kinematik juftlik rolini o’ynaydi .
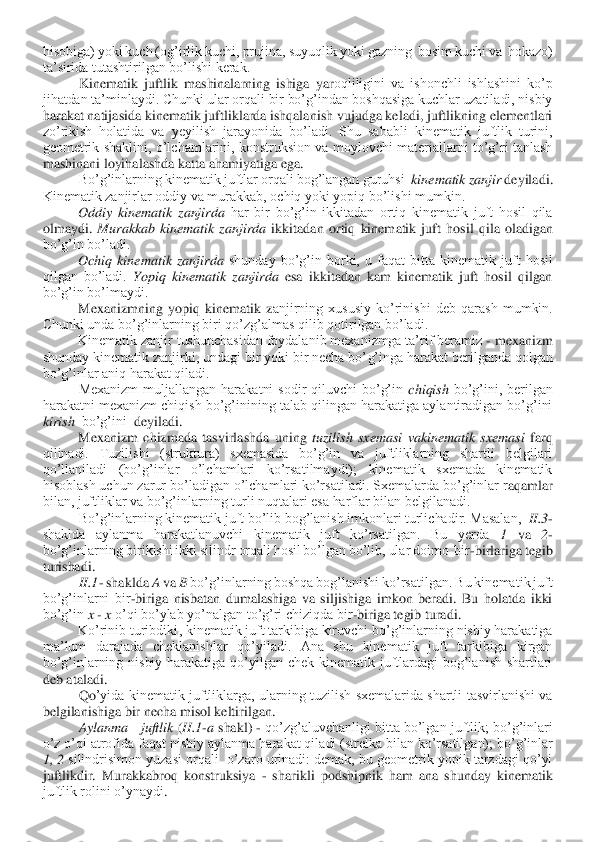
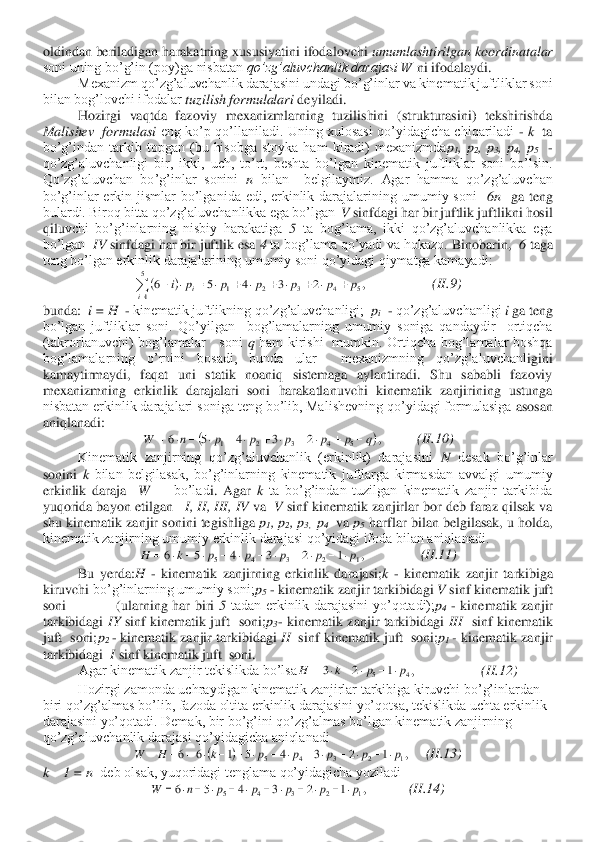
Ilgarilama juftlik (II.1 - b shakl,) - qo’zg’aluvchanligi bitta bo’lgan, bo’g’inlari faqat to’g’ri chiziqli nisbiy ilgarilama harakat qiladigan geometrik yopiq tarzdagi qo’yi kinematik juftlik. Silindrisimon juftlik (II.1 - v shakl,) - qo’zg’aluvch anligi ikkita bo’lgan, bo’g’inlari mustaqil ravishda aylanma va to’g’ri chiziqli ilgarilama nisbiy harakatlar qiladigan, geometrik yopiq tarzdagi qo’yi kinematik juftlik. Sferik juftlik (II.1 - g shakl,) - qo’zg’aluvchanligi uchta bo’lgan, bo’g’inlari x, u, z o’qlari atrofida mustaqil ravishda uch marta nisbiy aylana oladigan, geometrik yopiq tarzdagi qo’yi juftlik. Qo’zg’aluvchanligito’rttavabeshtabo’lganjuftliklarhamdaularningshartlibelgilanishi gamisollar II.1 - shakl, d,e , dakeltirilgan. Bo’g’inlarning mustaqil nisbiy harakatlari (aylanma va ilgarilama) strelkalar bilan ko’rsatilgan. Bular oliy juftliklardir, chunki bo’g’inlarning elementlari chiziq bo’yicha (silindr ichidagi shar) va nuqta bo’yicha (tekislikdagi shar) o’zaro urinadi. Birinchi juf tligi geometrik yopiq juftlik bo’lsa, ikkinchi juftligi esa kuch ta’sirida tutashuvchi juftlikdir. Qo’yi kinematik juftlarning oliy kinematik juftlarga nisbatan afzalliklaridan biri uning katta kuchlarni uzatish imkoniyatiga egaligidir, chunki qo’yi juftl ardagi urunuvchi bo’g’inlarning tegish yuzasi juda katta bo’lishi mumkin. Oliy juftlar qo’llanilganda mashinalardagi ishqalanishlar kamayadi (sharikli podshipnik bunga misol bo’ladi) va oliy juftlikni tashkil qiluvchi bo’g’inlarga aniq bir shakl berish yo ’li bilan mexanizm chiqish bo’g’inining har xil zarur harakat qonunlarini hosil qilish mumkin. a) b) v) g) d) e) II.1 - shakl Endi, kinematik juftlar tarkibidagi bo’g’inlarning nisbiy harakatiga qanday bog’lanishlar qo’yilishi va ularning soni qancha bo’lishini ko’rib chiqamiz. Ma’lumki, umumiy holda fazoda harakat qilayotgan har qanday qattiq jismning erkinlik darajasi 6 ga teng bo’lib, ulardan uchtasi x, y va z o’qlari bo’ylab ilgarilanma harakatdan, uchtasi esa shu o’qlar atrofida aylanma harakatdan iborat bo’ladi ( II.2 - shakl). Binobarin, absolyutqattiqjismgahyechqandaycheklanishqo’yilmasa, bujismtanlabolingan xOy koordinataerkinharakatqilaolarekan. Agar shu erkin jism boshqa bir jism bilan kinematik juft hosil qilsa, uning nisbiy harakatiga ma’lum darajada chek
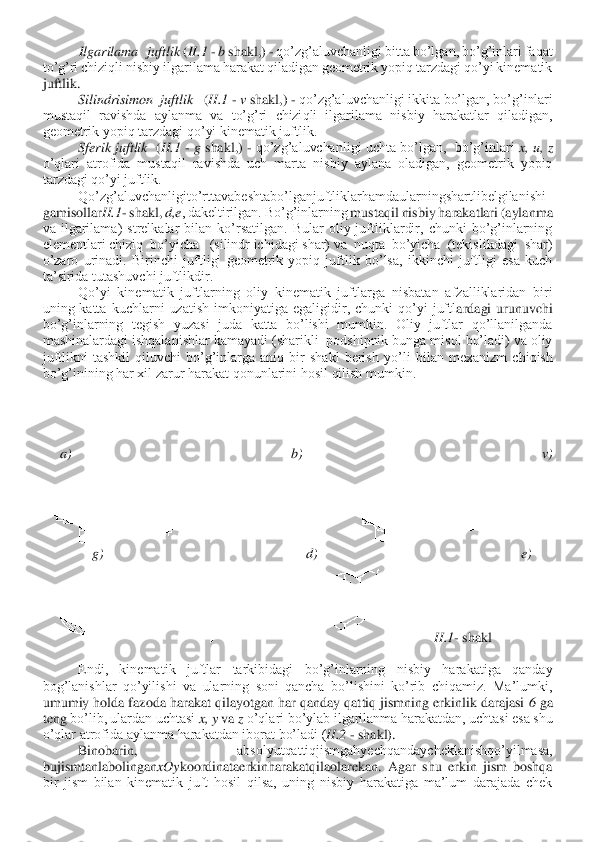
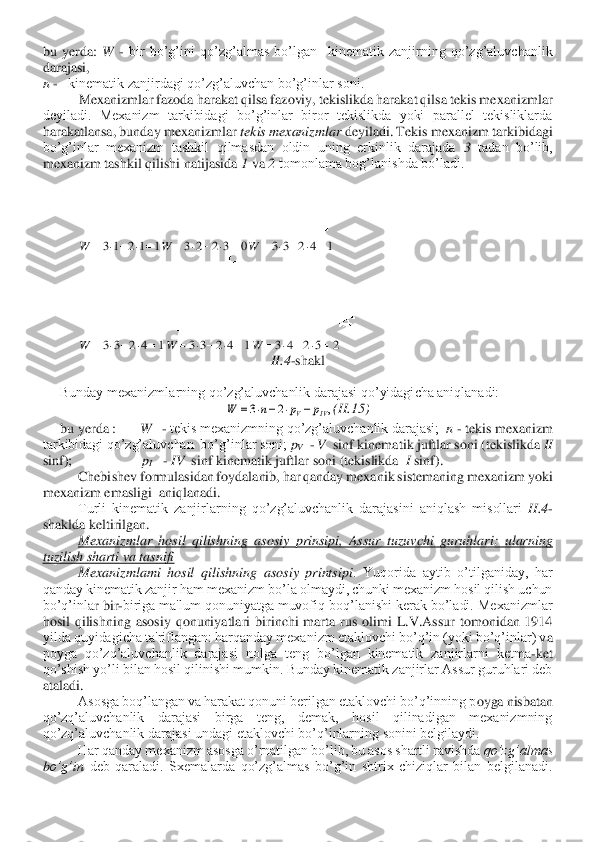
qo’yiladi. Nisbiy harakatga qo ’yilgan cheklar soni oltitadan kam bo’lishi kerak. Aks holda, kinematik juft xususiyati yo’qolib, bu juft qattiq, nisbiy harakatsiz jismga aylanadi. Agar nisbiy harakatga qo’yilgan bog’lanishlar soni birdan kichik bo’lsa, u holda ham kinematik juft bo’lma ydi, chunki, ikki jism bir -biriga jips holda harakatlanadi. Shunday qilib, bog’lanishlar (cheklar) soni 1…5 oraligida o’zgarar ekan. Agar kinematik juft tarkibidagi bo’g’inlarning nisbiy harakatidagi erkinlik darajasini H bilan, bog’lanish shartlari soni ni S bilan belgilasak, kinematik juftdagi bo’g’inning erkinlik darajasi soni qo’yidagi ifoda yordamida aniqlanadi H = 6 – S , (II.1) II.2 – shakl Bu ifodadan ham ko’rinib turibdiki, nisbiy haraka tdagi kinematik juft bo’g’inining erkinlik darajasi 1…5 oralig’ida o’zgarishi mumkin. Butun kinematik juftlar, ularning tarkibidagi bo’g’inlarning nisbiy harakatiga qo’yilgan cheklar soniga qarab, beshta sinfga bo’linadi. Bu sinflar ( II.1 ) tenglamani qo’y idagi ko’rinishi yordamida aniqlanadi S = 6 – H , (II.2) Bu tenglamadan foydalanib, kinematik juftlarning sinflariga oid misollarni ko’rib chiqamiz. Tekislik ustida to’rgan shar ( II.3 -a shakl). Shar bilan tekislik b irgalikda kinematik juft hosil qiladi. Agar sharni A harfi bilan, tekislikni esa B harfi bilan belgilasak, shar tekislikda uchta x,y va z o’qlar atrofida aylanma harakat va x, z o’qlar bo’ylab ilgarilanma harakat qila oladi. Shar y o’qi bo’ylab pastga h arakat qila olmaydi, chunki, uning harakatiga tekislik to’sqinlik qiladi. Demak, shar bilan tekislik orasida bog’lanish hosil bo’ldi. Sharni yuqoriga ko’tarish yaramaydi, aks holda shar bilan tekislik orasidagi bog’lanish bo’ziladi va juftlik yo’qoladi. Sh unday qilib, sharning 3 ta o’q atrofida aylanma va ikki ( x,y) o’qlari bo’ylab ilgarilanma harakati mavjud ekan. Natijada, shar 5 xil harakatda bo’ladi, bu esa sharning erkinlik darajasi sonini bildiradi, bog’lanishlar soni esa S = 6 – H = 6 - 5 = 1, (II.3) Shunday qilib, shar bilan tekislik I sinf kinematik juft hosil qiladi. Agar tekislik ustida silindr bo’lsa, bu silindr x va y o’qlar atrofida aylanma, y va z o’qlar bo’ylab ilgarilanma harakat qila oladi ( II.3 -b shakl). Demak, kinematik juft bo’g’ini bo’lgan silindrning erkinlik darajasi soni 4 ga teng. Silindrga qo’yilgan bog’lanishlar soni esa S = 6 – H = 6 – 4 = 2 , (II.5) Demak, bu kinematik juft II sinfga mansub ekan. Bog’lanishlar soni uchga teng bo’lgan kinematik juftni ko’rib chiqaylik ( II.3 -v shakl). Sferik qobiq ichiga solingan shar bunga misol bo’la oladi. A bo’g’in (shar) sirtqi yuzasi bilan V bo’g’inning ichki y uzasiga doimo tegib turishi va bo’g’inlarning biri ikkinchisiga nisbatan faqat shu yuzalar orqaligina nisbiy harakat qilishi mumkin. Bunday kinematik juft sharnirli (sharli sharnir) deb ataladi, bunday sharnirlar mashinasozlikda ko’p uchraydi.
A bo’g’innin g B bo’g’inga nisbatan yoki B bo’g’inning A bo’g’inga nisbatan harakati faqat x, z va y o’qlar atrofida bo’ladigan aylanma harakatdan iboratdir. A bo’g’inning yoki B bo’g’inning nisbiy ilgarilanma harakatiga chek qo’yilgan. Shunday qilib, bu shaklda ko’rs atilgan kinematik juft bo’g’inining erkinlik darajasi uchga tengdir. Unga qo’yilgan bog’lanishlar soni qo’yidagicha bo’ladi S = 6 – H = 6 - 3 = 3 , (II.6) Demak, bu kinematik juft III sinfga oid ekan. IV sinfga mansub kin ematik juftga kovak silindr ichiga joylashgan silindr misol bo’ladi ( II.3 g- shakl). Shaklda ko’rsatilgan yaxlit va g’ovak silindrlarning elementlari silindrik yuzalar bo’lib, ulardan birining yuzasi ( A bo’g’inniki) sirtqi silindrik yuza bo’lsa, ikkinchisin iki ( B bo’g’inniki) ichki silindrik yuzadir. Ikkala silindr ham kinematik juftning bo’g’inlari bo’lib, ular bir -biriga nisbatan faqat z o’qi atrofida aylanma harakat, shu o’q bo’ylab esa ilgarilanma harakat qila oladi, holos. Demak, kinematik juft tarkibidagi bo’g’inlarning erkinlik darajasi 2 ga teng ekan. U holda bog’lanishlar soni qo’yidagicha S = 6 – H = 6 - 4 = 2, (II.7) Binobarin, bu kinematik juft IV sinfga oid ekan. a) b) v) g) d) e) II.3 - shakl V sinfga mansub kinematik juftlar bilan tanishib chiqaylik. Bu turdagi kinematik juftlar hozirgi zamon mashina va mexanizmlarida juda ko’p uchraydi. Bu sinfdagi kinematik juftni hosil qilish uchun IV sinf kinematik juftning z o’qi bo’ylab ilgarilanma har akatiga chek qo’yamiz. U holda bo’g’in faqat shu o’q atrofida aylanadi, bordi -yu, aylanma harakatiga chek qo’yilsa, bo’g’in faqat x o’qi bo’ylab ilgarilanma harakat qiladi (II.3 -d shakl). Unda kinematik juft bo’g’iniga qo’yilgan bog’lanish shartlarining so ni qo’yidagicha bo’ladi S = 6 – H = 6 - 5 = 1, (II.8) Xulosa qilib shuni aytish mumkinki, bu kinematik juft V sinfga ta’luqli ekan. Kinematik zanjirlar va mexanizmlarning tuzilish formulalari . Har qanday kinematik zanjir ning fazodagi erkinlik darajasi undagi bo’g’inlar soni va kinematik juftliklar turi va soniga bog’liq bo’ladi. Lekin bu erkinlik darajasi bilan olinadigan harakatlar har doim tartibli bo’la olmaydi. Kinematik zanjir bo’g’inlari aniq yoki aniqlanishi mumkin bo’lgan tartib bilan harakat qiladigan mexanizmga aylanishi uchun u bo’g’in (poy)ga bog’lanishi va ba’zi bo’g’inlariga oldindan belgilangan qonunli harakat berilishi kerak. Mexanizmga