Mexanizmlarni grafik va grafoanalitik usullarda kinematik tahlil qilish
«Mexanizmlarni grafik va grafoanalitik usullarda kinematik tahlil qilish»
REJA: 1. Tekis richagli mexanizmlar kinematik sxemasi va holatlarini qurish; 2. Kinematik tahlilning tezlik va tezlanishlar rejalarini qurish (grafoanalitik) va kinematik diagrammalar qurish (grafik usullari).
Tekis mexanizmlarning holatlari, tezliklari va tezlanishlari rejalari va bo’g’inlar holatini, nuqtalar hamda bo’g’inlar tezliklari va tezlanishlarini aniqlashga imkon beruvchi mexanizmlarni tadqiq etishning grafik usullari keng tarqalgan. Bu hol loyihalashning amaliy masalalarini yechishdagi tezkorlik, qulaylik va yaqqollik bilan bog’liqdir. Yaqqollik grafik usullarga xos bo’lib, tekshirishga qulayligi bilan boshqa usullardan farq qiladi. Grafik usulda hisoblash geometrik yasashga asoslangan bo’ladi va ko’pincha u analitik va raqamli hisoblashdagi natijalarga birmuncha yaqin bo’lgan natijalarni beradi. Grafik usullarning aniqligi 0,3 ... 0,5% ni tashkil e tib, ko’pgina amaliy masalalarni yechish uchun yetarlidir.
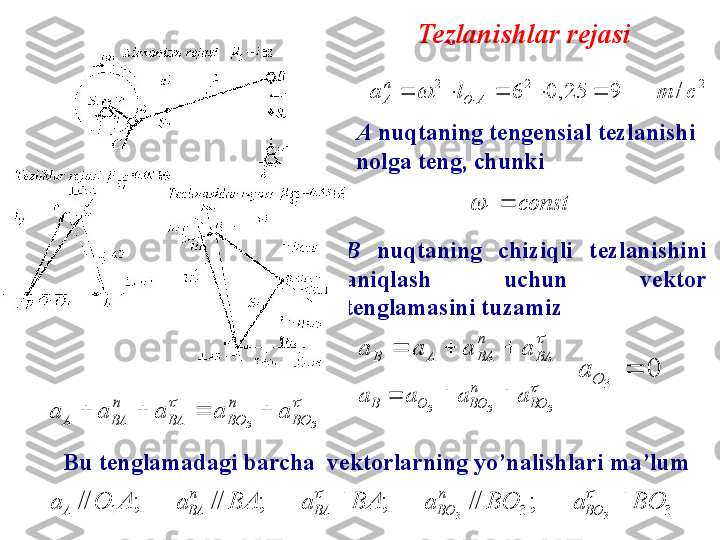
Tezlik va tezlanish rejalari deb, ayni paytda moduli va yo’nalishi bo’yicha mexanizm bo’g’inlari har xil nuqtalarining tezlik va tezlanishlariga teng bo’lgan kesmalar tarzidagi vektorlar tasvirlangan chizmaga aytiladi. Mexanizm uchun bu rejalar alohida-alohida bo’g’inlar uchun yasalgan bir nechta tezlik va tezlanishlar rejalarining majmui bo’lib, barcha bo’g’inlar uchun umumiy qo’tb bo’ladi va u mexanizm tezliklar yoki tezlanishlar rejasining q u tbi deb ataladi. Bu rejalarni qurish uchun nazariy mexanika kursidan ma’lum bo’lgan tezlik va tezlanishlarni qo’yish haqidagi teoremalardan foydalanamiz.
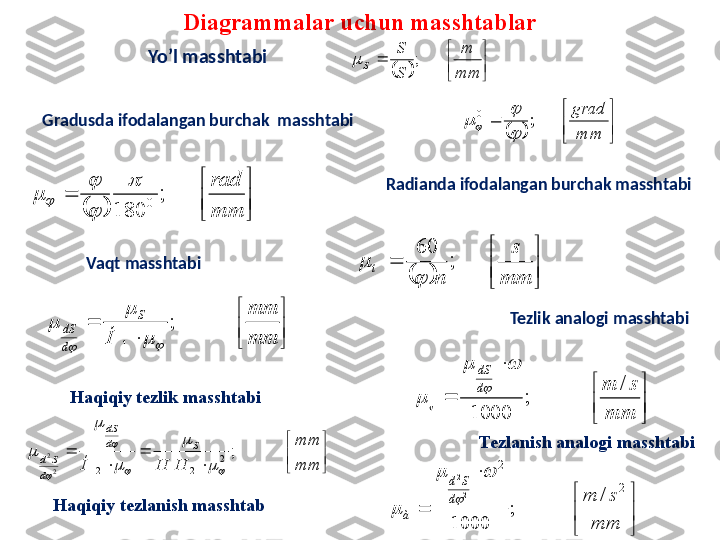
Mexanizmlarni kinematik tahlilini mexanizm rejasini qurish bilan boshlanadi. Mexanizm rejasi deb, yetakchi bo’g’inning ma’lum bir holatiga mos keluvchi tanlangan masshtab asosida chizilgan mexanizmning kinematik sxemasiga aytiladi. Mexanizm rejasini qurish uchun masshtab koeffisiyenti bo’g’inlar xaqiqiy o’lchamlarining metrdagi qiymatini rejadagi tanlangan o’lchamning millimetrdagi qiymatiga nisbati olinadi, ya’ni mm m AB AB l ; ) (