CHORRAHALARDA TRANSPORT VOSITALARI OQIMINI AVTOMATIK HISOBLASHNING KOMPYUTERLI KO‘RISHGA ASOSLANGAN DASTURIY VOSITASINI ISHLAB CHIQISH
![tasvirlar oqimida joylashuvini aniqlangan obyektlarni identifikasiyalash
usul va algoritmlari tadqiq etish;
tasvirlar oqimida transport oqimlari hisoblash yondashuvini ishlab chiqish.
Tadqiqotning ilmiy yangiligi. Magistrlik dissertatsiyasida olingan
natijalar ilmiy-amaliy xarakterga ega bo lib, YOLOv8 neyron tarmoq modeli,ʻ
DeepSort va Kalman filtri asosida chorrahalarda transport vositalari oqimini
avtomatik hisoblash yondashuvi ishlab chiqilgan. Ushbu yondashuvni amaliy
jihatdan tajriba o tkazish maqsadida Python dasturlash tilida dasturi ishlab
ʻ
chiqilgan.
Tadqiqotning asosiy masalalari va farazlari. Magistrlik dissertatsiyasida
asosan quyidagi bosqichlar amalga oshiriladi.
Ishda qo yilgan masalani yechish mavjud usullar tahlil etilib, model va
ʻ
algoritmlarni ishlab chiqish va dasturiy modulini yaratish bunda:
tasvir sifatini oshirish usullari asosiy tushunchalari o rganish va
ʻ
masala qo yilishi shakllantirish;
ʻ
tasvirlarda obyektlarni segmentasiya qilish usul va algoritmlarini
tadqiq etish;
tasvirlardagi aniqlangan obyektlarni tasniflashning chuqur neyron
tarmoq modeli arxitekturasini qurish ;
tasvirlardagi tasniflangan obyektlar identifikasiyalashni DeepSort
va Kalman filtriga asoslangan algoritmi ishlab chiqish.
ishlab chiqilgan yondashuvda tajriba-sinovlar o tkazish.
ʻ
Adabiyotlar sharhi va tahlili. Ilmiy tadqiqotni olib borish jarayoni va
dissertatsiya ishini yozishda foydalanilgan adabiyotlarning tahlilini keltiramiz.
[1]–[30] adabiyotlardan mavzuning dolzarbligi uchun foydalanildi va [2]–[47]
adabiyotlardan esa asosiy tushunchalar, tibbiy tasvirlarga ishlov berish usullari
o rganish olindi. [1] – [21] adabiyotlardan I bobda keltirilgan ma lumotlarni
ʻ ʼ
bayon qilishda foydalanildi. [50] – [120] adabiyotlardan ishda tadqiq qilingan
masalalarning algoritmlarini tuzishda foydalanildi. Dissertatsiyada olingan
natijalar [93] – [94] adabiyotlarda e lon qilingan.
ʼ
5](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_5.png)
![Bu tezyurar yo lga qo shiladigan transport vositalari oqimini nazorat qilishʻ ʻ
uchun rampa o lchashni o z ichiga oladi va yirik shaharlardagi transport
ʻ ʻ
nazoratini muvofiqlashtirish yo l harakati boshqaruvi markazida amalga
ʻ
oshiriladi. Foydalanuvchiga har daqiqada strategik qarorlar qabul qilish
imkonini beruvchi dinamik marshrut ko rsatmasi va haydovchiga oldingi
ʻ
avtomobildan xavfsiz yo lni ushlab turish uchun avtomobil tezligini avtomatik
ʻ
ravishda kamaytirish imkonini beruvchi moslashuvchan kruiz nazorati bilan bir
qatorda bo ladi.
ʻ
1.2 Intellektual transport tizimlarida qo‘llaniladigan asosiy
usullar
Intellektual transport tizimining asosiy komponentlari biri transport
vositalarini oqimini real vaqt rejimida samarali hisoblash usuli bo‘lib, uni tezkor
yo‘l boshqaruvi uchun yo‘l harakati boshqaruvi va qoidabuzarliklarni nazorat
qilishda foydanalanish muhim ahamiyatga ega. Transport vositalari oqimining
hajmi oshishi tezlik tirbandlik va to‘xtash natijasida sodir bo‘ladigan, yo‘l
harakati xavfsizligi uchun xavfli bo‘lgan yo‘l-transport hodisalarini keltirib
chiqarishdagi asosiy omillardan biri bo‘ladi[1].
So‘nggi yillarda chorrahalarda videokuzatuv tizimlari o‘rnatilishi sezilarli
darajada ortmoqda. Natijada bugungi kunda transport vositalari oqimi sensor
qurilmasi yoki tasvirni ishlov berishni an’anaviy usullariga asoslangan
hisoblashlarda foydalanish ko‘p vaqt va resursni talab etmoqda [2]. Bundan
kelib chiqib yo‘l harakati xavfsizligida, yo‘l harakati yo‘riqnomalari va yo‘l
harakati qoidalarini buzish holatlarini bartaraf etishda mavjud tizimlarda to‘liq
foydalanish uchun sun’iy intellektga asoslangan kompyuterli ko‘rish va chuqur
o‘qitish usullarini qo‘llash muhimdir.
Transport vositalari oqimini hisoblashda keng qo‘llaniladigan usullari
asosan video ma’lumotlardan transport vositalarini aniqlash va kuzatishni o‘z
ichiga oladi. Transport vositasini harakatlanuvchi obyekt sifatida ajratib olish va
ajartilgan obyektlarni ketma-ket aniqlash bosqichlarni o‘z ichiga oladi. Bu
obyektni aniqlash usullari fonni olib tashlash [3,4], transport vositasini tashkil
12](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_12.png)
![etadigan kadrlar farqi aniqlashni o‘z ichiga oladi [5,6]. Fonni olib tashlash
usulida fonni yangilash uchun o‘rtacha qiymatdan foydalanadi va fonni
yangilashi natijasida transportni ajratish yaxlitligi va transportni sohasini
aniqlashga ta’sir qiladi. Kadrlar farqi usuli avtomobil tezligi va ketma-ket
kadrlarning ma’lum vaqt oralig‘idan farq qilishni ko‘rsatadi. Optik oqim usuli
piksellarning zichlikini baholashga asoslangan bo‘lib, murakkab hisoblashga
egaligi yondoshuvdan real vaqt rejimida ilovalarda foydalanishga mos
kelmaydi. Keyingi yillarda murakkab ssenariylar maqsadini aniqlashda,
kompyuterli ko‘rish, mashinani o‘qitish usullari qo‘llaniladi. Maqsadni aniqlash
uchun chuqur o‘qitish usullaridan biri o‘ramali neyron tarmoq arxitekturasi
taklif etilgan. Bu esa belgilarni o‘zi ajratish, inson tomonidan ajratib berilgan
nisbatan yuqori natijalarga erishilganligi kuzatilmoqda. Mashinani o‘rganishdan
farqli o‘laroq, chuqur o‘rganishga asoslangan mavjud maqsadni aniqlash
tizimlari taklifga asoslangan usullarga bo‘linishi mumkin, masalan, R-CNN [8],
SPP-net [9 , Fast R-CNN [10], Faster R-CNN [11] va Mask R-CNN [12] va
taklifsiz usullar, masalan, Single Shot Multibox Detector (SSD) [13] va You
only Look (YOLO) [14]. Taklifga asoslangan usullardan farqli o‘laroq, SSD va
YOLO maqsadli joylashuv va tasnifni tezda bashorat qilish uchun standart
o‘rnatish usuli va kirish tasvirini kup qatlamlarga bo‘lish usulidan foydalanadi,
bu esa o‘qitish va aniqlash jarayonini tezroq bajaradi. R-CNN va SSD tezkor
aniqlash samaradorligini kafolatlaydi va uning aniqlash YOLOdan ancha
ustundir. Bundan tashqari, yorliqli o‘quv namunalarining etarli soni va vakillik
o‘rgatish namunalarini oqilona tanlash SSD usulida hal qiluvchi rol o‘ynaydi
[15]. Umuman olganda, samarali chuqur o‘rganish modellari va ma'lumotlar
to‘plamidan har tomonlama foydalanish transport vositalarini aniqlash tezligi va
aniqligini oshirish uchun muhim ahamiyatga ega.
Transport vositalarini kuzatish transport vositalarini hisoblashda muhim rol
o‘ynaydi va so‘nggi yillarda tobora ko‘proq e’tiborni tortmoqda. Videolar
asosida transport vositalarini hisoblash uchun mavjud yondashuvlar chuqur
o‘rganishga asoslangan kuzatuv algoritmlariga [16], onlayn usullarga (MDP
13](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_13.png)
![[17]) va to‘plamga asoslangan usullarga (IOUT [18]) bo‘linishi
mumkin . Amalda, onlayn usullarda asoslangan usullar kichik maqsadni
aniqlashda qiyinchiliklarga duch keladi. Xiang va boshqalar. [17] maqsadni
aniqlash uchun transport vositalarini aniqlab olish uchun onlayn usul
qo‘llaniladi, ammo uning o‘lchov aniqligi har xil turdagi transport vositalari
mavjud bo‘lsa va avtomobil tezligini taqsimlash bir xil bo‘lmasa, okklyuzionga
jiddiy ta'sir qiladi. Hozirgi vaqtda videoga asoslangan avtomobilni kuzatishning
asosiy usullarini generativ usul va diskriminativ usulga bo‘lish mumkin
[19]. Sparse Coding yaqain yillargacha ALSA va L1APG [21] kabi generativ
kuzatuv [20] usullarining asosi edi. Hozirgi vaqtda diskriminativ kuzatuv
usulining vakili sifatida korrelyatsiya filtrlash usuli asta-sekin asosiy o‘rinni
egalladi va Kalman filtri [22] va yadro korrelyatsiya filtri (KCF) [23] kabi
qoniqarli natijalarga erishdi. Mavjud chuqur o‘rganishga asoslangan kuzatuv
algoritmlari [16] chuqur o rganishni aniqlashga asoslangan va keyin kuzatishʻ
uchun KCF, Kalman filtrlash va boshqa algoritmlardan foydalaniladi. Shu bilan
birga, KCF va Kalman filtrlashi oldingi ramka holatidan joriy kadrning holatini
aniqlashi kerak, ya’ni maqsadli pozitsiyalarning mumkin bo‘lgan nomzod
mintaqalari guruhini olish uchun harakat modelini qurish orqali cheklovlarni
o‘rnatishi kerak. Bu usul faqat bitta maqsadni kuzatish uchun javob beradi, lekin
ko‘p maqsadli kuzatish amalga oshirilganda, okklyuzion muammolar tufayli
xatolarini kelib chiqadi.
Ushbu ishda avtotransport vositalarini aniqlash, transport vositalarini
kuzatish va transport vositalarini hisoblashni o‘z ichiga olgan tezkor video
ketma-ketligiga asoslangan yangi transport oqimini hisoblash usuli taqdim
etilgan. Tabiiy tasvirlardan farqli o‘laroq, biz yaratgan tezkor video ketma-
ketligiga asoslangan yangi ma’lumotlar to‘plami turli xil transport vositalarini
samarali aniqlash uchun SSD modeli tomonidan o‘qitilgan. Bundan tashqari,
avtomobilni kuzatish uchun tavsiya etilgan algoritm okklyuzion, deformatsiya
va avtomobil shkalasi o‘zgarishi natijasida kelib chiqqan traektoriya
muammosini samarali hal qilishi mumkin. Transport vositalarining traektoriya
14](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_14.png)
![nuqtasining beqarorligi muammosini hal qilish uchun transport vositalarining
fazoviy-vaqtincha taqsimot ma’lumotlarini ko‘rib chiqadigan va transport
vositalarining tirbandlikda qolishini muammosini samarali hal qiladigan
transport vositalarini kuzatish uchun yangi avtomobil korrelyatsiyasiga mos
keladigan algoritm taklif etiladi. Eng kichik kvadratlar usuliga asoslangan
transport vositalarining traektoriyasini optimallashtirish algoritmi taklif qilingan,
bu avtomobilni kuzatish jarayonida uzilishlarni samarali hal qiladi. Ko‘p
avtomashinalarni hisoblash usuli ishlab chiqilgan bo‘lib, u turli oqim
yo‘nalishlarida transport vositalarining toifalari bo‘yicha hisoblashni amalga
oshiradi.
Transport oqimi ma’lumotlarini tahlil qilish transportni boshqarish va
boshqarish uchun samarali ma’lumotni taklif qilish orqali intellektual transport
tizimida (ITS) [ 5 ,38] muhim vazifadir.Video ketma-ketlikda ishlaydigan
transport vositalarining oqimini hisoblash eng yaxshi marshrutlarni tanlash,
svetoforlarni boshqarish va hukumatlarga yangi yo‘llar qurish to‘g‘risida qaror
qabul qilishda va transport tizimini kengaytirishni rejalashtirishda
qo‘llaniladigan turli ilovalarda muhim jarayondir. Bu raqamlar tirbandlik
darajasi, qator bandligi va yo‘l harakati intensivligini o‘z ichiga olgan transport
holatini ko‘rsatadi[ 8] . Bunday ma’lumotlardan marshurtini avtomatik
rejalashtirish, yo‘l tirbandligining oldini olish va hodisalarni erta aniqlash uchun
foydalanish mumkin. An’anaviy transport tizimlarida transport vositalarini
hisoblash jarayoni har doim maxsus sensorlar yordamida amalga
oshiriladi. Biroq, ularning o‘rnatish narxi va oddiy format bu sensorlar uchun
ba’zi cheklovlarni anglatadi.
Raqamli videoni qayta ishlashning o‘sishi bilan tasvirni qayta ishlash va
kompyuterli ko‘rish texnikasiga asoslangan hisoblash tizimi avtomobil turini,
tezligini, zichligini va yo‘l-transport hodisasini aniqlashda katta aniqlikdagi
muqobil usulni taklif qiladi [3 ] . Mashinali ko‘rishda hisoblash usuli - bu
aniqlash, kuzatish va traektoriyani qayta ishlashdan iborat integratsiyalashgan
protsedura. Transport vositalarini aniqlash transport oqimi xususiyatlarini
15](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_15.png)
![olishning birinchi bosqichi hisoblanadi [34]. Uning maqsadi Ob’ektning
joylashuvi va tasnifini tasvirdan olishdir [ 13 ]. Uning asosiy vazifasi Ob’ektning
xususiyatlarini olishdir. Past darajali dekompozitsiyaga asoslangan an’anaviy
aniqlash yondashuvlari [ 31 , 37 ], gauss aralashmasini modellashtirish [ 40 ],
morpgologik operatsiyalar [ 12 ] va asosiy komponentlar tahlili [ 24 ] aniqlash
uchun ishlatilishi mumkin. Ob’ektda qandaydir deformatsiya yoki o‘lchov
o‘zgarishi bo‘lsa, u yaxshiroq ishlashni namoyish etadi. Biroq, bu usullar katta
aylanishlarga moslasha olmaydi, zaif barqarorlikka ega va hisoblashda
sekin. So‘nggi yillarda chuqur o‘rganish strategiyalari, aniqrog‘i konvolyutsion
neyron tarmoqlari (CNN) [ 10 , 11 , 17 , 20 , 25 ], ko‘plab kompyuterli ko‘rish
vazifalarida, jumladan, Ob’ektlarni aniqlash va tasniflashda an’anaviy
yondashuvlarga nisbatan sezilarli yutuqlarni ko‘rsatdi.
Transport vositalarini aniqlash va kuzatish odatda ikkita alohida protsedura
sifatida amalga oshiriladi. Tasvirlarda avtomobilni aniqlash fazoviy ko rinishʻ
xususiyatlariga tayanadi, avtomobilni kuzatish esa fazoviy ko rinish va
ʻ
vaqtinchalik harakat xususiyatlariga tayanadi [ 6 , 9 , 13] . Transport vositalarining
fazoviy domenining vizual va tashqi ko‘rinish xususiyatlariga qaratilgan
transport vositalarini aniqlash usullari bo‘la boshladi. Rasmlar va videolarda
transport vositalarini aniqlash va hisoblash muammolarini hal qilish uchun
usullar joriy etilgan. Biroq, shakl, masshtab, Ob’ekt ko‘rinishi, soyalar,
yorug‘lik sharoitlari va qisman tiqilib qolishdagi o‘zgarishlar tufayli bu hali ham
ochiq masala. Aniqlash yoki kuzatish uchun alohida sezilarli yutuqlarga
erishilgan bo‘lsada, ularning aksariyati hali ham past aniqlik bilan yuqori
hisoblash murakkabligini talab qiladi.
Ob’ektni aniqlash va hisoblash aniqligini oshirish va saqlash va o‘qitish
xarajatlarini minimallashtirish uchun kuzatuv ma’lumotlaridan foydalanishga
ko‘p harakat qilindi. Bundan tashqari, Ob’ekt detektori odatda o‘tkazib
yuborilgan aniqlash va hisoblash jarayonini yomonlashtiradigan noto‘g‘ri
pozitivlardan aziyat chekadi. Bunday muammolar tufayli ushbu ish aniqlash va
hisoblash jarayonlarini kuchaytirish uchun ma’lumotni aniqlash va kuzatish
16](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_16.png)
![bilan belgilash uchun samarali hisoblash strategiyasi taklif etiladi. Bundan
tashqari, biz CNN arxitekturasining uchta toifasining ishlashini transport
vositalarini aniqlash kontekstida, aniqlik va ishlov berish vaqti nuqtai nazaridan
baholashni ko‘rib chiqamiz. Biz ko‘p ma’lumotlar to‘plamida tajribalar
o‘tkazdik va taklif qilingan usul aniqlik va eslab qolish nuqtai nazaridan eng
yaxshi samaradorlikni ko‘rsatdi. Xulosa qilib aytganda, ushbu tadqiqot quyidagi
to‘rtta asosiy natijani taqdim etadi:
Tez va ishonchli transportni aniqlash va hisoblash strategiyasi taqdim
etish. Ishlab chiqilgan strategiya tezroq va ishonchli natijaga erishish uchun
regressiyaga asoslangan CNN afzalliklari va optik oqim ma'lumotlaridan
foydalanadi.
Aniqlik va ishlov berish tezligi nuqtai nazaridan transport vositalarini
aniqlash va hisoblash kontekstida kuzatuv ma'lumotlari bilan hamkorlikda
aniqlash qismida ishlatiladigan CNN arxitekturasining uchta toifasi ishlashining
har tomonlama tahlili keltirilgan.
Aniqlanishga asoslangan ikkita toifaning ish faoliyatini baholash taqdim
etiladi, birinchisi aniqlash qarori faqat YOLO-v8 asosida qabul qilinganda va
ikkinchisi aniqlash YOLO-v8 va kuzatuv ma lumotlariga asoslangan.ʼ
Ma'lumotlar to‘plami bo‘yicha keng qamrovli tajribalar taklif etilayotgan
strategiyaning samaradorligini va uning samarali aniqlik bilan tezroq aniqlash va
natijalarni hisoblash qobiliyatini namoyish etadi.
II.BOB. VIDEO MA’LUMOTLARDAN OLINGAN TASVIRLARDA
OBYEKTLARNI SEGMENTATSIYALASH USUL VA ALGORITMLARI
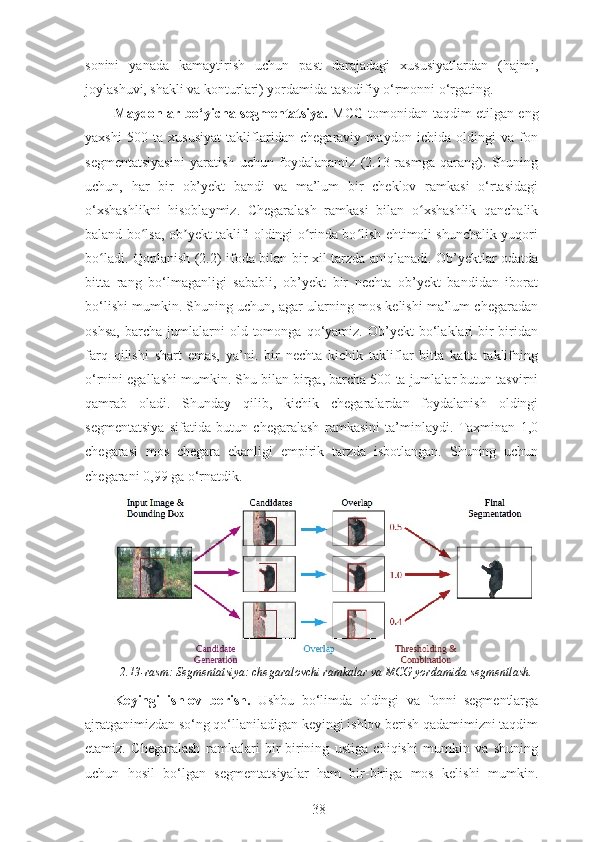
Ushbu bobda sust nazorat qilinadigan uchdan-uchgacha o‘qitilgan
segmentatsiya modelini taqdim etamiz. Shu maqsadda Dai va boshqalar
tomonidan taklif qilingan ko‘p vazifali tarmoq kaskadi (MNC) modelidan
foydalandik. [50] va sust boshqaruv sifatida chegaralovchi ramkalardan
18](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_18.png)
![foydalanishga ruxsat berish orqali uni yaxshilang. Piksel boshiga izohli
segmentatsiya niqoblarini ishlatish o‘rniga, har bir chegaraviy maydonda
niqoblarni sust tarzda yaratish uchun old va fon segmentatsiyasi algoritmlaridan
foydalanamiz. 2.1- paragrafda uchta mustaqil vazifadan iborat asosiy
rejalarimizni taqdim etamiz. Birinchidan, YOLO [51] yordamida chegaralovchi
ramkalar ko‘rinishidagi ob’yektni aniqlash. Ikkinchidan, har bir chegaraviy
ramkada segmentatsiya niqoblarini sust tarzda yaratish uchun ettita turli oldingi
va fon segmentatsiyasi algoritmlaridan foydalanamiz. Nihoyat, segmentatsiya
maskalarini yaxshilash uchun keyingi ishlov berish bosqichidan foydalanamiz.
Ushbu asosiy ko‘rsatkichlar bilan neyron tarmog‘imizni o‘rgatmasdan oldingi va
fon segmentatsiyasi algoritmlarini baholaymiz. Bundan tashqari, ushbu
ko‘rsatkichlar bizning erkin boshqariladigan tarmog‘imiz bilan solishtirishni
ta'minlaydi.
2.1. Blok segmentatsiyasidan foydalaniladigan asosiy chiziqlar
Ushbu bo‘limda uchta vazifadan iborat asosiy rejalarimizni taqdim etamiz.
Bu tayanch chiziqlar mustaqil algoritmlarning birikmasidir. Siz faqat bir marta
ko‘ring ob’yekt detektori (YOLO) [77] yordamida chegaralangan ramka
ob’yektlarini aniqlashning birinchi vazifasi 1.1-paragrafda tasvirlangan. Ikkinchi
masalada ob’yektni har bir cheklovchi ramka ichida segmentlash uchun ettita
turli xil old va fon segmentatsiyasi algoritmlaridan birini qo‘llaymiz. Shunday
qilib, har bir segmentatsiya algoritmining funksionalligini va modifikatsiyamizni
tasvirlaymiz, unga ko‘ra algoritm bizning uchta vazifali tuzilmamizda ishlaydi.
Oxirgi vazifa ikkinchi vazifaning segmentatsiya maskalarini takomillashtirish
uchun keyingi ishlov berish bosqichidir Buning yordamida barcha old va fon
segmentatsiyasi maskalari birlashtiriladi va qo‘shimcha ravishda DenseCRF
[96] dan foydalanamiz.
19](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_19.png)
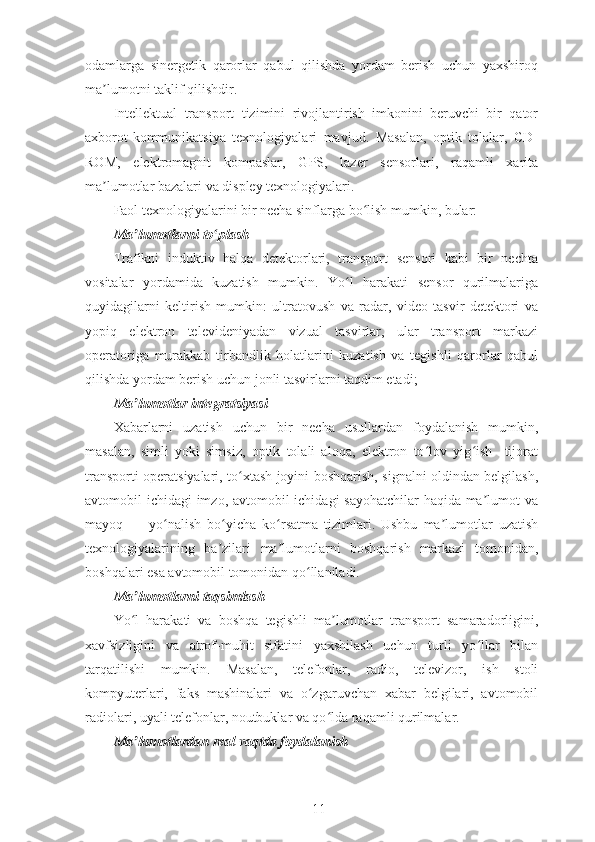
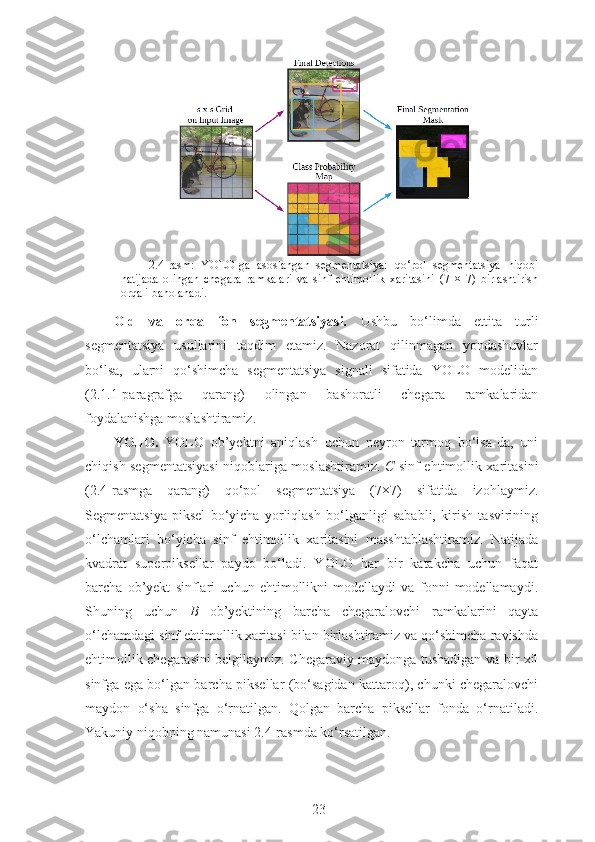
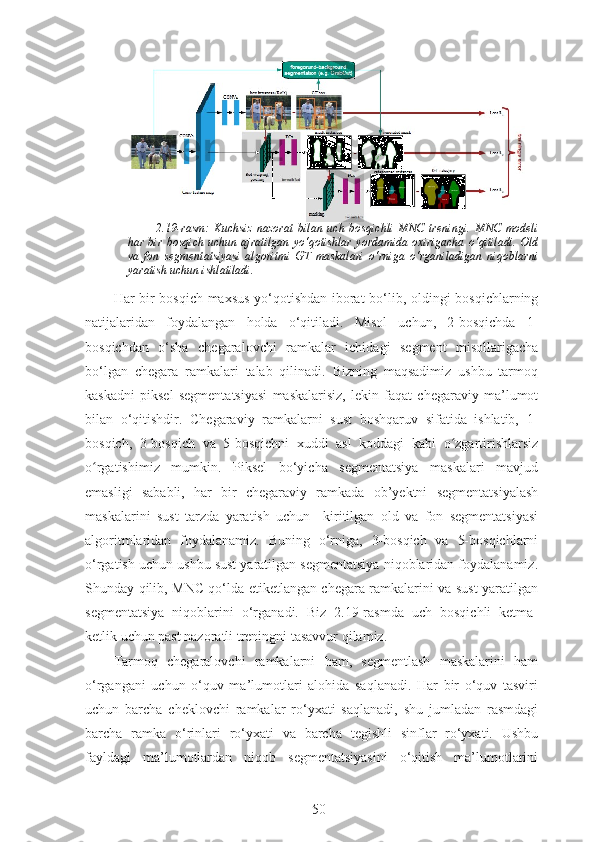
![2.1-rasm: uchta vazifaning asosiy tuzilishi: (1) eksa bo‘ylab tekislangan chegara
ramkalari yordamida ob’yektni aniqlash, (2) chegaralash ramkalari ichida oldingi va fon
segmentatsiyasi, (3) mumkin bo‘lgan keyingi ishlov berish bosqichi
2.2-rasm: YOLO regressiya tizimi: Ob’yektni aniqlash tizimi tasvirni s × s panjaraga
ajratadi. Har bir katakcha uchun model b chegaralovchi ramkalarni, b ishonch qiymatlarini
va c sinf ehtimolliklarini bashorat qiladi [ 77].
Obyektni aniqlash. Ushbu bo‘limda Redmon va boshqalar [ 77]
tomonidan 2016 yilda taklif qilingan ob’yektlarni aniqlash uchun neyron
tarmog‘i YOLOni taqdim etamiz. U nafaqat yuqori aniqlash aniqligini, balki tez
chiqishni ham ta’minlaydi (soniyada 45 kadr [89]). Bundan tashqari, Redmon va
boshqalar. soniyasiga 155 kadr tezlikda tasvirlarni qayta ishlovchi Fast YOLO
nomli kamroq aniq modelni taklif qildi [89]. Bizning asosiy segmentatsiya
ko‘rsatkichlarimiz uchun aniqroq modeldan foydalanamiz.
Aniqlash. YOLO ob’yektni aniqlashning barcha zarur bosqichlarini bitta
uchdan-uchgacha o‘qitilgan neyron tarmog‘iga birlashtiradi. Shunday qilib,
muhim qadamlardan biri tasvirni s×s panjarasiga bo‘lishdir (2.2-rasmdagi chap
rasmga qarang). Har bir katakcha faqat markazlari unga tushadigan ob’yektlarni
aniqlash uchun javobgardir. Ushbu tarmoqdagi har bir katak b chegaralovchi
ramkalarni va b mos keladigan ishonch ballarini bashorat qiladi. Birinchidan,
ishonch balli modelning ramkada ob’yekt mavjudligiga qanchalik ishonchli
ekanligini ko‘rsatadi. Bu P (Ob’yekt) ehtimolligi bilan modellashtirilgan.
Ikkinchidan, GT chegaralash ramkasiga ko‘ra, bashorat qilingan ramka
20](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_20.png)
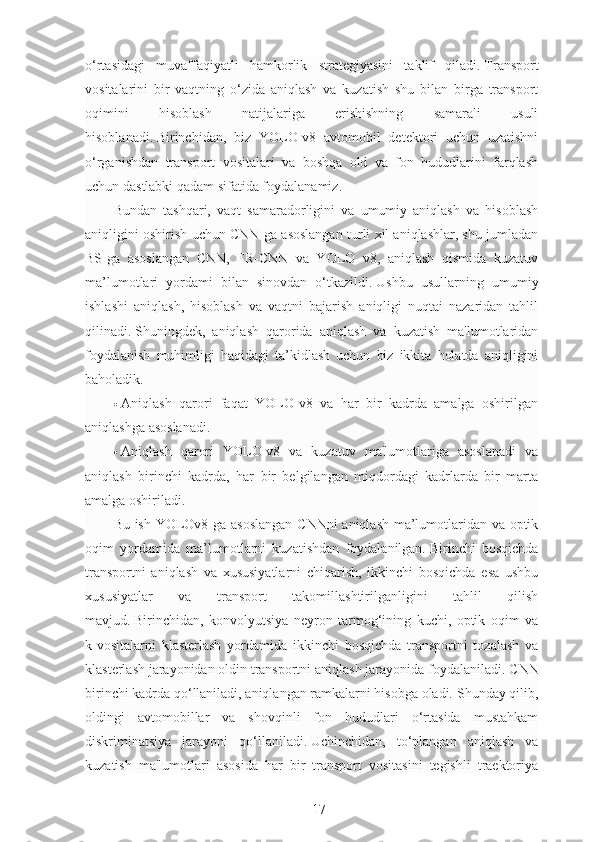
![c =20. Redmon va boshqalar qolgan parametrlarni o‘rnating: s =7, b =2. Bu
7×7×30 tenzoriga olib keladi.
Tarmoq arxitekturasi va o‘qitish. Tez olib tashlashga erishish uchun
Redmon va boshqalar kamroq parametrlarga mos keladigan nisbatan sayoz
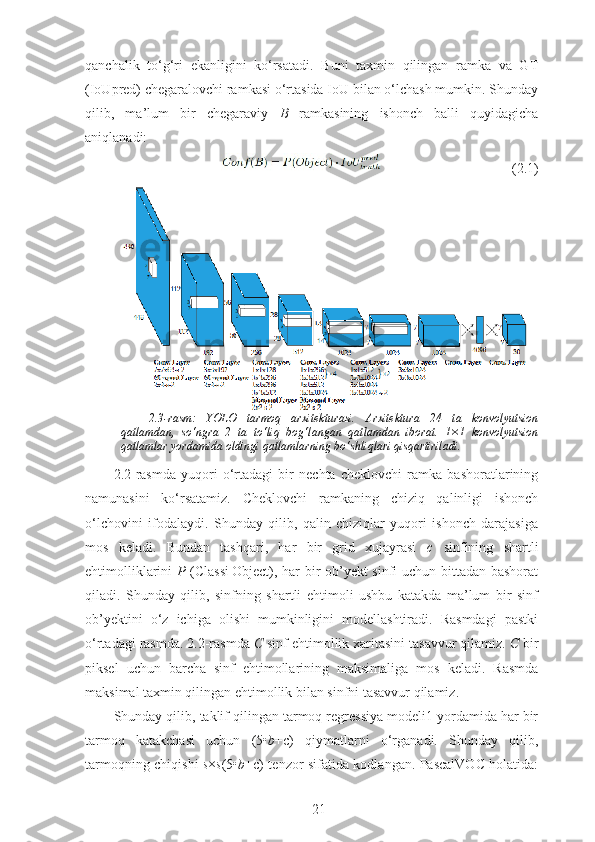
neyron tarmog‘ini taklif qiling [ 89]. Ushbu tarmoq (2.3-rasmga qarang) 24 ta
konvolyutsion qatlamdan, so‘ngra ikkita to‘liq bog‘langan qatlamdan iborat.
Shunday qilib, barcha 24 qatlamdan 9 ta konvolyutsion qatlam 1×1 filtr
o‘lchamiga ega. Bu qatlamlar xususiyat xaritasi hajmini va shuning uchun
parametrlar sonini kamaytirish uchun ishlatiladi. Barcha konvolyutsion
qatlamlar birgalikda tasvirdan xususiyatlarni olish uchun mas’uldirlar va to‘liq
bog‘langan qatlamlar keyin chiqish ehtimoli va chegaraviy ramka
koordinatalarini bashorat qiladi.
Tarmoq tegishli og‘irliklarni topish uchun oldindan o‘qitiladi va keyin
tozalanadi. Dastlabki 20 ta qatlam, undan keyin o rta hovuz qatlami va to liqʻ ʻ
bog langan qatlam ImageNet klassi 1000 raqobat ma lumotlar to plamida [46]
ʻ ʼ ʻ
oldindan o rganiladi. Keyinchalik, etishmayotgan konvolyutsion qatlamlar va
ʻ
etishmayotgan to‘liq bog‘langan qatlamlar 20 ta oldindan tayyorlangan
qatlamlarga qo‘shiladi.
Qo‘shilgan konvolyutsion va to‘liq bog‘langan qatlamlar tasodifiy ravishda
ishga tushiriladi. Ishga tushirilgandan so‘ng, neyron tarmoq ob’yektni aniqlash
vazifasiga o‘rgatiladi. Trening davomida Redmon va boshqalar kompozit
yo‘qotish funksiyasini optimallashtirish. Har bir qism kvadratik xatolar
yig‘indisiga asoslanadi va tasniflash prognozidagi yoki chegaraviy ramka
koordinatalarini bashorat qilishdagi xatolar uchun jazolanadi. Bundan tashqari,
ushbu yo‘qotish funksiyasi, agar ob’yekt ushbu katakchada mavjud bo‘lsa,
tasniflash xatosini jazolaydi. Bundan tashqari, agar bashoratchi GT ramkasiga
javob bersa, chegaraviy ramka koordinatasi xatosini ham jazolaydi.
22](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_22.png)
![(a) (b) (c)
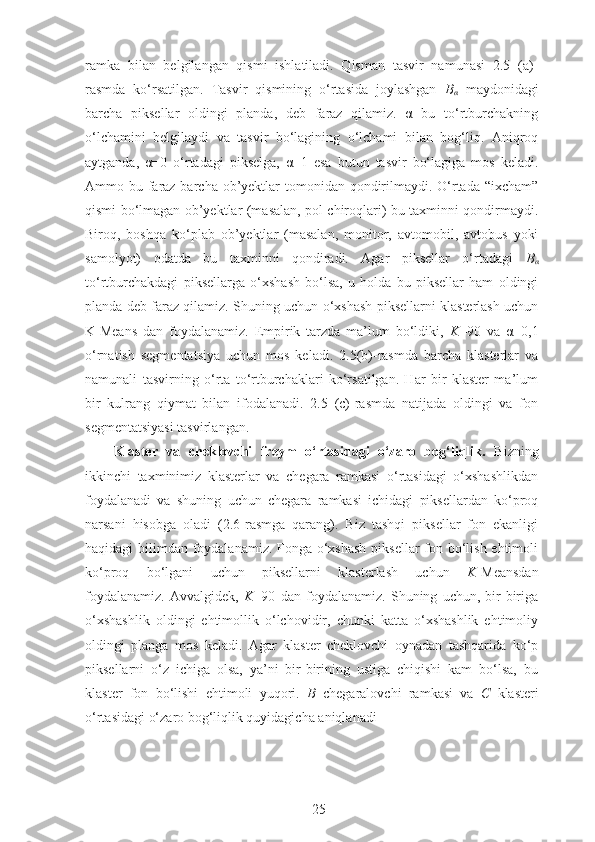
2.5-rasm: K-Means Mid: Chegaraviy ramkaning markazidagi piksellarni va
ularning tegishli klasterlarini oldingi plan sifatida olib, tasvirni segmentlarga
ajrating.
K- Means. Old va fon segmentatsiyasini klasterlash muammosi deb
hisoblash mumkin, chunki oldingi va fon piksellarini guruhlashni xohlaymiz.
RGB rang maydonida I tasvirning har bir pikseli pi uchta qiymat bilan
ifodalanadi: qizil, yashil va ko‘k. Biz bir xil rangdagi piksellarni klasterlash
uchun K-Means dan foydalanamiz. Biroq, bir xil rangdagi piksellar bir xil sinfga
tegishli bo‘lishi shart emas. Shuning uchun, chegaralangan maydon ichida
oldingi va fon segmentatsiyasiga erishish uchun qo‘shimcha taxminlar qildik va
keyin ushbu taxminlarga asoslangan ikkita asosiy segmentatsiya algoritmini
taqdim etamiz.
Ob’yektni chegaralovchi ramkaning o‘rtasiga joylashtirish. Birinchi
taxminimiz Papandreu va boshqalarning g‘oyasiga ergashadi, ular chegara
ramkasi o‘rtasida joylashgan piksellar katta ehtimollik bilan oldingi planda
bo‘lishini taklif qiladi [86]. Ushbu taxmin real dunyo ob’yektlarining
xususiyatlariga asoslanadi. Biz aniqlamoqchi bo‘lgan ob’yektlarning aksariyati
“ixcham” ya’ni. teshiklarni o‘z ichiga olmaydi. Qarama-qarshi misollar asosan
zinapoya yoki velosiped kabi nozik tuzilgan narsalardir. PascalVOC
ma’lumotlar to‘plamida velosipeddan tashqari deyarli barcha ob’yektlar shunday
ixchamlikni ko‘rsatadigan qismlarga ega. Ushbu taxmindan so‘ng,
segmentatsiya ushbu “ixcham” hududlarni chegara ramkasi ichida topishga mos
keladi. Shuning uchun, butun rasm I emas, balki I
B tasvirining chegaralovchi
24](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_24.png)
![2.7-rasm. Moslashuvchan chegara: har xil harorat T (4≤T≤12, min=0,2,
maks=0,8, b=0,375) bilan moslashish chegarasi misoli.
(2.3)θ
sigmaoid funksiyaga asoslangan va uni sozlash imkoniyatlari mavjud.
Min va max parametrlari
θ diapazonini cheklaydi, bunda Min mumkin bo‘lgan
minimal chegaraga, Max esa mumkin bo‘lgan maksimal chegaraga to‘g‘ri
keladi. Parametr T sigmaoid funksiyaning qiyaligiga mos keladi va harorat
deyiladi. b shift parametri funksiyani x o‘qi bo‘ylab siljitadi (2.7-rasmga
qarang).
GrabCut. GrabCut – bu Rother va boshqalar tomonidan taklif qilingan
erkin boshqariladigan segmentatsiya algoritmi. 2004 yilda [54] va Boykov va
boshqalarning ishiga asoslangan [3]. GrabCut-ning asosiy g‘oyasi tasvirni
grafikaga aylantirish va ushbu grafikga minimal kesish qo‘llash orqali oldingi va
fon segmentatsiyasiga erishishdir. P
i ∈ I piksellaridan tashkil topgan berilgan I
tasvir uchun GrabCut algoritmi kirish sifatida qo‘shimcha ravishda
chegaralovchi maydonni talab qiladi. Chegaraviy maydon tashqarisidagi har bir
piksel fon bo‘lib, TB to‘plamiga tayinlangan. Chegaraviy ramkadagi piksellar
noma’lum deb hisoblanadi va TU to‘plamiga tayinlanadi. Maqsad noma’lum
piksellarni fon to‘plami TB yoki oldingi TF ga belgilashdir. Gauss aralashmasi
27](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_27.png)
![modellari (GMM) oldingi va fonning rang taqsimotini modellashtirish uchun
ishlatiladi.
Bunga U ma lumotlar atamasi va silliqlik atamasi ʼ V dan iborat bo lgan ʻ E
energiyasini minimallashtirish orqali erishiladi. Boikov va boshqalar tasvirni
G = ⟨ V,E ⟩ grafigiga aylantirish va ushbu grafikda minimal kesishni qo llash orqali
ʻ
E ni minimallashtirish orqali erishiladi. [41]. Misol jadvali 2.8-rasmda
ko‘rsatilgan.
Har bir pi piksel G grafigida v
i ∈ V tugun sifatida qaraladi. Har bir tugun
qo‘shni piksellar tugunlari bilan chekka bilan bog‘langan. Har bir chekka e ∈ E
ga vazni beriladi. Bu og‘irlik piksellarning o‘xshashligiga mos keladi va Evklid
masofasidan foydalangan holda hisoblanadi. Bundan tashqari, grafikga ikkita
qo‘shimcha tugun qo‘shiladi: manba tugun S oldingi/ob’yekt terminali va
maqsad tugun T fon terminali sifatida. Har bir tugun manba va maqsad tuguniga
ulangan. V
i (piksel) tugun va manba tugun S yoki maqsad tugun T o‘rtasidagi
og‘irliklar p
i pikselining oldingi yoki fonda bo‘lish ehtimolini ko‘rsatadi. Ushbu
ehtimollik yuqorida aytib o‘tilgan GMMlar tomonidan modellashtirilgan. w
e >0
og‘irlik har bir chekka e qo‘llaniladi, chunki ular ehtimollikni modellashtiradi.
Minimal kesim maqsad tugunni va manba tugunini ajratib turadi va tomonidan
aniqlanadi
(2.4)
28](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_28.png)
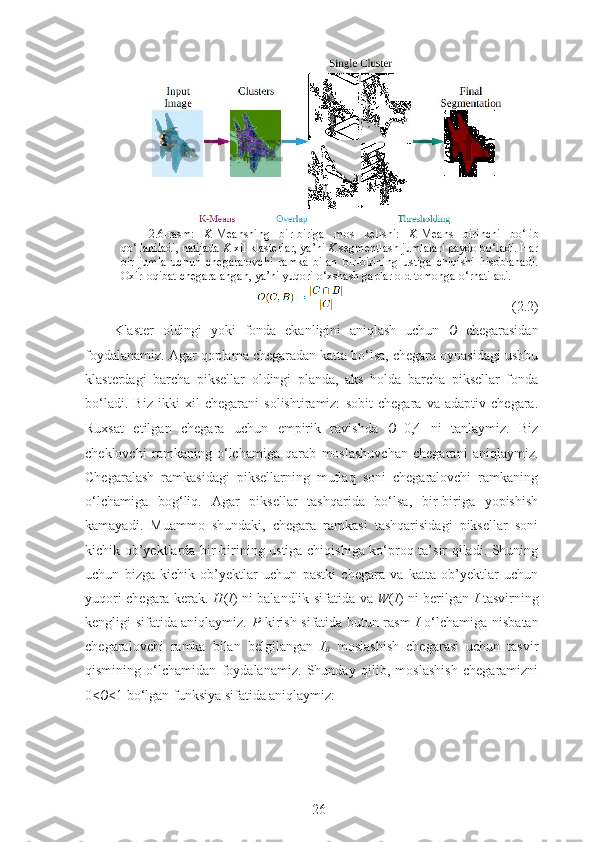
![2.8-rasm: GrabCut: GrabCut yordamida tasvirni grafikga aylantirish va minimal
kesimni qo‘llash orqali oddiy 3×3 tasvirni segmentlash. Old va fon modeli B (old) va O (fon)
izohli piksellar yordamida o‘rganiladi. Qirralarning qalinligi piksel o‘xshashligiga yoki
oldingi yoki fon modeliga o‘xshashligiga mos keladi.
Bundan tashqari, bu kesish E energiyasini minimallashtiradi. Kesishni
qo‘llash natijasida E ning ikkita kichik to‘plami, biri S bilan bog‘langan,
ikkinchisi T bilan bog‘langan. Bu ikki kichik to‘plam old va fon
segmentatsiyasini, ya’ni T
F va T
B piksellarini belgilashni belgilaydi.
Rother va boshqalar bu fikrni iterativ yondashuv bilan kengaytirdilar [54].
Har bir iteratsiyada oldingi va fon modelini qayta baholash orqali natija
yaxshilanadi. Misol uchun, birinchi minimal kesish bilan erishilgan
segmentatsiya nima oldingi va nima fon ekanligini ko‘proq bilishga olib keladi.
Ushbu ma’lumot GMM parametrlarini qayta baholash uchun ishlatilishi
mumkin. Qayta baholangan oldingi va fon modellari o‘z navbatida keyingi
iteratsiyada segmentatsiyani yaxshilashi mumkin. 3-Algoritm butun GrabCut
iterativ protsedurasini belgilaydi. Shunday qilib, GMM komponentlarini
piksellarga belgilash silliqlik muddati V ni minimallashtirishga to‘g‘ri keladi va
GMM parametrlarini o‘rganish esa U ma’lumotlar muddatini
minimallashtirishga to‘g‘ri keladi. Bundan tashqari, minimal kesish butun
energiyani E ni kamaytiradi.
Minimal to‘siqni aniqlash. Minimal to‘siqni muhim ob’yektni aniqlash
(MBOD) – bu Chjan va boshqalar tomonidan taklif qilingan tezkor nazoratsiz
muhim ob’yektni aniqlash algoritmi. 2015 yilda [107]. Chjan va boshqalar
ob’yektni aniqlash uchun ikkita faraz qildilar:
29](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_29.png)
![˗ ko‘zga tashlanadigan narsalar, ya’ni ob’yekt va fon o‘rtasidagi katta
farq;
˗ ob’yektlar tasvirning o‘rtasida joylashgan.
Ikkinchi taxmin kundalik vaziyatlarda olingan fotosuratlarning aksariyati
uchun to‘g‘ri keladi. Suratga olishda qiziqish ob’yekti odatda o‘rtada bo‘ladi.
Biroq, agar rasmda bir nechta qiziqish ob’yektlari mavjud bo‘lsa, bu taxmin
muammoli bo‘ladi, masalan. bir nechta mashinalar bilan tirbandlik holati.
Shuning uchun qo‘shimcha ma’lumot sifatida chegara ramkasidan
foydalanamiz.
MBOD chegara hududlarini hisobga olgan holda fon modelini hisoblab
chiqadi. Shuning uchun chegaralovchi ramka bilan belgilangan I
B fragmentini
emas, balki | I
B | bilan kattalashtirilgan IˆB fragmentini ishlatamiz |IB|< |IˆB |< |
I|
. Shunday qilib, algoritmni cheklovchi ramka tashqarisidagi piksellar
yordamida, ya’ni kafolatlangan fon piksellaridan foydalangan holda fon
modelini o‘rganishga majbur qilamiz. Chjan va boshqalar ob’yektni tasvirning
o‘rtasida (bu holatda
IˆB kattalashtirilgan pastki tasvirning o‘rtasida) qabul
qilishadi va shuning uchun o‘rtadagi piksellar chegara yaqinidagi piksellarga
qaraganda ko‘proq oldingi planda bo‘ladi. Shunday qilib, Zhang va boshqalar
pikseldan tasvir chegarasigacha bo‘lgan masofani hisoblaydigan juda tez,
taxminiy minimal to‘siq masofasini (MBD) aylantirish algoritmini taqdim eting.
Bu masofa to‘g‘ridan-to‘g‘ri pikselning oldingi ehtimoli bilan bog‘liq. Agar
masofa katta bo‘lsa, piksel katta ehtimol bilan oldingi planda bo‘ladi. Agar
masofa kichik bo‘lsa, piksel katta ehtimollik bilan fon bo‘ladi.
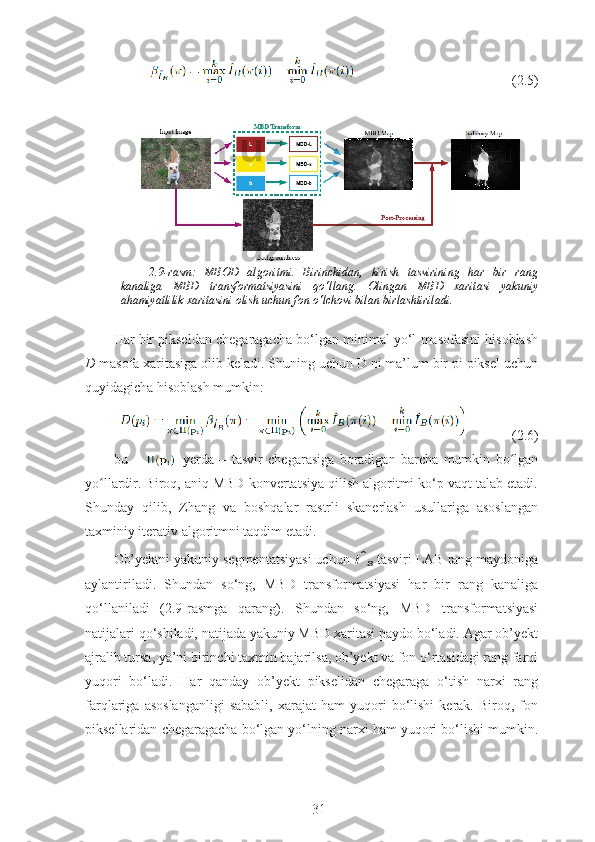
Masofani konvertatsiya qilish. MBD o‘zgartirish algoritmi tasvir pikseli
IˆB
dan chegaragacha bo‘lgan yo‘lni aniqlaydi. p = ⟨ p (0),..., p ( k ) ⟩ yo‘li qo‘shni
piksellar ketma-ketligi bo‘lib, xarajat funksiyasi bilan aniqlangan ma’lum bir
xarajatga ega. Chjan va boshqalar MBD dan xarajat funksiyasi sifatida
foydalanadilar, Strand va boshqalar [57] 2013 yilda taklif qilgan masofa:
30](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_30.png)
![Qoniqarli taxmin (sezilarli ob’yektlar mavjudligi) holatida, fon piksellari uchun
yuqori yo‘l narxi kamroq bo‘ladi.
Fon modeli. MBD xaritasi qo‘shimcha fon signali bilan yaxshilanadi.
Chjan va boshqalar qo‘shimcha U masofali xaritasini tasvirning chekka kontrast
xaritasi (IBC) deb nomlanadi. Ushbu xaritaning har bir pikseli asl tasvirdagi
ushbu pikselning fon modelidan masofasiga teng. Fon modeli tasvirning to‘rtta
chegara hududi bilan belgilanadi: pastki, yuqori, chap va o‘ng (2.10-rasmga
qarang). Ikkinchi taxminga ko‘ra, chegaraga yaqin hududlar ancha fon
hisoblanadi. Har bir chegara hududi uchun o‘rtacha rang m
k va kovariatsiya Q
k
hisoblanadi, shuning uchun fon aniq modellashtirilgan. Har bir chegara hududi
uchun Zhang va boshqalar. Mahalanobis masofasidan foydalanib, individual
IBC U
k grafigini hisoblang. Evklid masofasidan farqli o‘laroq, Mahalanobis
masofasi kovariatsiya matritsasidan foydalanadi. Agar kovariatsiya matritsasi
identifikatsiya matritsasi bo‘lsa, Mahalanobis masofasi Evklid masofasiga
aylanadi. Piksel p
i dan fon modeligacha bo‘lgan Mahalanobis masofasi
quyidagicha aniqlanadi:
(2.7)
U
k normallashtirildi, shunday qilib U
k ( p
i ) [0, 1] da yotadi:
(2.8)
Yakuniy IBC U xaritasi barcha individual Buyuk Britaniya IBC
xaritalarining o‘zgartirilgan yig‘indisidir, agar ob’yektlar bir chegara hududida
joylashgan bo‘lsa, bu ishonchliroq bo‘ladi:
(2.9)
Ushbu IBC xaritasi ham barcha qiymatlar [0,1] ichida bo‘lishi uchun
masshtablangan. Oxirgi qadam, shuningdek, rasmda ko‘rsatilgan. (2.9) tenglik
oldingi MBD kartasi va oddiy qo‘shilish orqali IBC kartasining kombinatsiyasi.
Ishonchli fonni aniqlash. Ishonchli fonni aniqlash (RBD) – bu Zhu va
boshqalar tomonidan taklif qilingan nazoratsiz algoritm. 2014 yilda [106]
32](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_32.png)
![ob’yektni aniqlash uchun. MBOD [107] kabi, Zhu va boshqalar ob’yektlar
tasvirning o‘rtasida joylashganligini va shuning uchun tasvirning chegarasiga
ozgina tegishini hisobga oling. Zhang va boshqalar esa. Har bir pikseldan tasvir
chegarasigacha bo‘lgan masofani hisoblang [107], Zhu va boshqalar
superpiksellar va ularning chegaraviy ulanishiga asoslangan mustahkam fon
o‘lchovini taklif qiling. Superpiksel – bu bir-biriga yaqin joylashgan va
tasvirning haddan tashqari segmentlanishi natijasida yuzaga keladigan o‘xshash
piksellar guruhidir (2.11-rasmdagi chap rasmlarga qarang). Biz ob’yektni uning
chegarasi ichida aniqlayotganimiz sababli, ob’yekt muqarrar ravishda tasvir
chegarasiga tegadi. Shuning uchun biz
B chegaraviy ramkasi bilan belgilangan kattalashtirilgan qisman IˆB
tasviridan foydalaning.
Chegaraviy ulanish. Kengaytirilgan ulanish deb ataladigan tavsiya etilgan
o‘lchov R maydonining tasvirning chetiga qanchalik og‘irligini aniqlaydi.
(2.10)
bu yerda B – tasvirning chegara hududlari to‘plami, p – tasvirning
mintaqasi. BndCon (·) mintaqadagi barcha uchastkalarga nisbatan chegara
uchastkalarining foizini aniqlaydi. Kvadrat ildiz o‘lchov o‘zgarmasligiga
erishish uchun ishlatiladi. Biroq, bu ta’rifni hisoblash qiyin. Shuning uchun
superpiksellarga asoslangan muqobil ishlatiladi. Chju va boshqalar Achanta va
boshqalar tomonidan taklif qilingan oddiy chiziqli iterativ klasterlash (SLIC)
[40] yordamida 200 ta superpikselni hisoblashadi. 2012 yilda (2.11-rasmga
qarang). Shundan so‘ng, ular barcha qo‘shni superpiksellarni ( p , q ) birlashtirib,
yo‘naltirilmagan vaznli grafikni quradilar. d
app ( p , q ) ning mos keladigan og‘irligi
ularning CIE-Lab rang maydonidagi o‘rtacha ranglari orasidagi Evklid
masofasidan hisoblanadi. Har qanday ikkita superpiksel orasidagi geodezik
masofadan foydalanish har bir superpiksel p uchun “qoplama maydoni”ga olib
keladi:
33](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_33.png)
![(2.11)
S ( p , p
i ) superpiksel pi ning p maydoniga qanchalik hissa qo‘shishini
ko‘rsatadi. Xuddi shunday, “chegara bo‘ylab uzunlik” quyidagicha aniqlanadi:
(2.12)
bu yerda d (·) superpiksel chegaraga tegishli bo‘lsa 1 ga, aks holda 0 ga
teng. Xulosa qilib aytganda, chegaraviy ulanish (2.10) ifodaga o‘xshash tarzda
quyidagicha aniqlanadi:
(2.13)
(2.13) ifodani hisoblash uchun barcha superpiksellar juftlari orasidagi eng
qisqa yo‘llar Jonson [66] algoritmi yordamida samarali hisoblab chiqiladi.
Quvur liniyasining ahamiyatli xaritasi. 2.11-rasmda ko‘zga
tashlanadigan narsalarni aniqlash uchun to‘rt bosqichli quvur liniyasi
ko‘rsatilgan. Birinchi qadam d
pp ( p , q ) masofasidan foydalanib, atrofdagi
superpiksellarga nisbatan har bir superpiksel p kontrastini hisoblashdir (2.11-
rasmga qarang). Keyin superpiksel kontrasti Ctr quyidagicha aniqlanadi:
(2.14)
bu yerda Superpiksel markazlari orasidagi
masofa p va p
i esa d
spa ( p , p
i ) sifatida aniqlanadi. Zhu va boshqalar o‘rnating
σ
spa =0,25 Ikkinchi bosqich mustaqil, birinchi qadam va superpiksel uchun
fon ehtimoli hisoblaydi. Bu ehtimollik chegaraviy bog‘lanish bilan bog‘liq,
ya’ni tasvir chegarasi bilan bog‘lanish qanchalik katta bo‘lsa,
ehtimoli shunchalik katta bo‘ladi. Fon ehtimoli quyidagicha aniqlanadi:
(2.15)
Zhu va boshqalar empirik ravishda σ
bnd Con =1 [106] ni o‘rnatdilar. Shundan
so‘ng kontrast xaritasi Ctr fon ehtimoli wbg bilan tortiladi. Ushbu
takomillashtirilgan kontrast xaritasi wCtr quyidagicha aniqlanadi:
34](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_34.png)
![Uchala shart ham kvadrat xatodir, shuning uchun optimal va yakuniy
ahamiyatga ega xaritani eng kichik kvadratlar algoritmi yordamida osongina
hisoblash mumkin.
Ko‘p masshtabli kombinatorli guruhlash. Ko ‘ p masshtabli kombinatoriy
guruhlash ( MCG ) Arbel ’ aez va boshqalar tomonidan taklif qilingan algoritmdir .
reytingli nomzod ob ’ yektlarini yaratadi [39]. Ushbu nomzod ob ’ yektlar chegara
segmentatsiyasi uchun ishlatilishi mumkin . Segmentatsiya ierarxiyasi
S ={ S 0
,., S L
} nomzod ob ’ yektlarini yaratish uchun ishlatiladi . S 0
super
piksellarning eng yaxshi to‘plami bo‘lsa-da, S L
to‘liq
tasvirdir. Muayyan S i
segmentatsiyasi turli sohalaridan iborat.
Bunday holda, qo‘pol darajadagi har bir mintaqa nozik darajadagi
hududlarning birlashmasi hisoblanadi. Masalan, S i +1
segmentatsiyasi S i
segmentatsiyasidagi hududlarning birlashishi natijasida yuzaga keladi. Bunday
ierarxiyani har bir S i
darajasiga haqiqiy indeks l ni belgilash orqali ultrametrik
kontur xaritasi (UCM) sifatida ko‘rsatish mumkin. Har bir qo shni mintaqalarʻ
juftligi chegarasini ular birlashtirilgan indeks bo yicha tortish natijasida UCM
ʻ
hosil bo ladi. UCMda li darajasidagi chegara
ʻ S i
segmentatsiyasini hosil
qilganligi sababli, bu tasvir chekkalarni ajratib olish va ierarxik tasvir
segmentatsiyasi vazifasini birlashtiradi. Keyin UCM reytingli nomzod
ob’yektlarini yaratish uchun ishlatiladi. Butun tizim 2.12-rasmda ko‘rsatilgan va
keyin uni batafsil tasvirlab beramiz.
Ruxsat etilgan masshtab segmentatsiyasi. Asl kirish tasviri bir nechta
rezolyutsiyaga va N masshtabga ega piramida yaratish uchun quyi
namunali/super-namunalangan. Shundan so‘ng tavsiya etilgan bir masshtabli
segmentatsiya piramidadagi har bir tasvirga qo‘llaniladi, natijada har bir tasvir
uchun UCM hosil bo‘ladi. Bir miqyosli segmentatsiya bilan Arbel’aez va
boshqalar. Quyidagi mahalliy tsikl signallarini ko‘rib chiqing:
1. Yorqinligi, rangi, tuzilishi, uchta o‘lchamdagi yarim disklarning farqlari
[78].
2. Yamoqlarda siyrak kodlash [103].
36](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_36.png)
![2. O‘rmonning tuzilgan konturlari [55].
Kontur signallari segmentatsiyani grafikni bo‘lish muammosi sifatida
hisobga olgan holda mustaqil ravishda segmentlanadi va shuning uchun
normallashtirilgan kesish mezonidan foydalanadi. [97] Arbelaez va boshqalar
o‘z qiymatlarini hisoblash asosida chekkalarni aniqlash uchun
normallashtirilgan kesmalar uchun samarali algoritmni taklif qildilar.
Normallashtirilgan kesish algoritmi yordamida segmentatsiyadan so‘ng, global
va mahalliy signallar chiziqli ravishda birlashtiriladi va UCM o‘rtacha kontur
kuchiga asoslangan holda quriladi.
Ierarxiyani tekislash. UCM-dagi piksel xatolar yakuniy xususiyat
takliflariga katta ta’sir ko‘rsatishi mumkin, chunki UCM topologiyasi va kuchi
asosiy segmentatsiya ierarxiyasini aniqlaydi. Shunday qilib, UCM miqyosi
ahamiyatsiz emas. Nozik tuzilmalar va tafsilotlarni saqlab qolish uchun
Arbel’aez va boshqalar masshtablash va tekislash bosqichidan foydalaning. Ular
har bir ierarxiyadagi eng yaxshi superpiksellarni ajratib oladilar, ularni asl tasvir
o‘lchamlariga o‘lchaydilar va ularni mumkin bo‘lgan chekka joylari sifatida
e’lon qiladilar. Keyin har bir UCM qayta o‘zgartirilgan eng yaxshi superpiksel
to‘plamlari yordamida rekursiv ravishda uzatiladi.
Ko‘p masshtabli ierarxiya. Hizalama N shkalaning har biri uchun chekka
joylarining qat’iy to‘plamini hosil qiladi. Arbelaez va boshqalar buni ikkilik
qirralarning tasnifi muammosi sifatida tuzadilar va Platt usuli [83] yordamida
ushbu N xususiyatni bir chekka taxminiy ehtimollikka birlashtirgan
klassifikatorni o‘rgatishadi.
Nomzodlarni kombinatsion guruhlash. Arbelaez va boshqalar uchta
alohida shkala va ko‘p miqyosli ierarxiyadan bitta elementlarni, juftlarni,
uchliklarni va 4-tubelarni ko‘rib chiqadilar, natijada 16 nomzod ro‘yxati paydo
bo‘ladi. Birinchidan, bu nomzodlar ikkita qarama-qarshi maqsad funksiyasi
bilan o‘quv muammosini optimallashtirish orqali kamayadi: nomzodlar soni va
erishish mumkin bo‘lgan sifat. Bu harakat nomzodlar sonini milliondan
minglabgacha kamaytiradi. Ikkinchidan, Arbel’aez va boshqalar nomzodlar
37](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_37.png)
![Shunday qilib, qaysi pikselni old planda ko‘rishni hal qilishimiz kerak. Biz
Khoreva va boshqalarni kuzatib boramiz. [68] va Papandreu va boshqalar. [86]
va kichikroq maydonga ega segmentatsiyani tanlash orqali aniqlang. Shunday
qilib, yakuniy segmentatsiya niqobida kichikroq segmentlar kamroq tez-tez
yo‘qolishi mumkin emas.
Zich shartli tasodifiy maydonlar. Bundan tashqari, Krahenbuhl va
boshqalar tomonidan taklif qilingan umumiy postprocessing algoritmini taqdim
etamiz: Zich shartli tasodifiy maydonlar (DenseCRFs) [70]. CRF grafik model
bo‘lib, unda har bir piksel boshqa tugunlarga bog‘liq bo‘lgan ushbu modelning
tugunidir. CRFlar alohida piksellardagi unar potentsiallarni va qo‘shni
piksellardagi juftlik potentsiallarini o‘z ichiga oladi. Natijada paydo bo‘lgan
CRF qo‘shni strukturasi uzoq masofali ulanishlarni modellashtirish qobiliyatida
cheklanganligi sababli (2.14-rasmga qarang), Krähenbuhl va boshqalar. to‘liq
ulangan CRF dan foydalaning va samarali taxminiy algoritmni taklif qiling.
Bizning holatda CRF ikkita tasodifiy maydondan iborat X =x
1 ,...,x
N } va
I ={ i
1 ,..., i
N }. I – N o‘lchamdagi barcha mumkin bo‘lgan kirish rasmlarini qamrab
oladi va X barcha mumkin bo‘lgan piksel darajasidagi teglarni qamrab oladi.
Bundan tashqari, i
j – rang, x
j esa j pikseliga tayinlangan yorliqdir. CRF
energiyasi [70] sifatida aniqlanadi:
(2.18)
bu yerda i va j pikselni belgilaydi va 1 dan N gacha bo‘ladi. Birlik
potentsial psu ( x
i ) har qanday segmentatsiya algoritmi bilan beriladi (2.1.2-
bo‘limga qarang). Juftlik potentsiali izchil yorliqlash uchun javobgardir va
Gausslarning chiziqli birikmasidir. To‘liq bog‘langan CRFlarda samarali hosila
olish o‘rtacha maydonning yaqinlashuviga asoslanadi. Ushbu yaqinlashish
taxminiy chiqish uchun iterativ xabar uzatish algoritmini beradi.
39](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_39.png)
![2.14-rasm: Ulanishlarni taqqoslash: CRF qisqa masofali ulanishlar va
DenseCRF uzoq masofali ulanishlarni solishtirish.
2.2. Uchdan uchgacha segmentatsiya modeli
Ushbu bo‘limda Dai va boshqalar [50] ishlariga asoslangan uchdan-
uchgacha o‘qitilgan segmentatsiya modelimizni taqdim etamiz. Buning uchun
ular tomonidan taqdim etilgan koddan foydalanamiz. Ushbu kod Matlab manba
kodining Caffe ramkasi [67] yordamida python-da qayta amalga oshiriladi.
Ularning kodini ham, o‘quv ma’lumotlarini ham o‘zgartiramiz, chunki chegara
ramkalarini o‘rganish kuzatuvi sifatida ishlatamiz. Keltirilgan eng yaxshi old va
fon segmentatsiyasi algoritmlarimizdan har bir GT chegarasidagi ob’yektni
segmentatsiyalash niqoblarini sust tarzda yaratish uchun foydalanamiz. Bizning
neyron tarmog‘imiz qo‘lda etiketlangan segmentatsiya maskalari o‘rniga ushbu
niqoblarni eslab qoladi. Birinchidan, ko‘p vazifali tarmoq kaskadi (MNC)
modelini batafsil taqdim etamiz barcha o‘rganish parametrlarini (masalan,
o‘rganish tezligi) eslatib o‘tamiz. Nihoyat, tarmoqni o‘qitish kodini
chegaralovchi ramkalar bilan ishlash uchun o‘zgartirishni tasvirlaymiz.
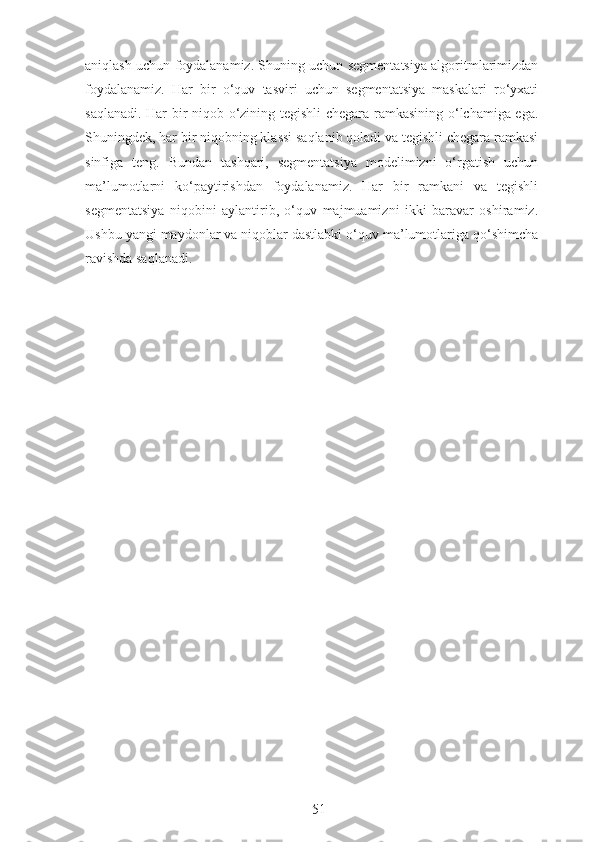
Ko‘p vazifali tarmoq kaskadlari. Ushbu bo‘limda Dai va boshqalar
tomonidan taklif qilingan neyron tarmoq tizimini tavsiflaymiz. [50] 2016-yilda
ko p vazifali tarmoq kaskadi (MNC) deb ataladigan ushbu neyron tarmoqni sustʻ
boshqariladigan misollarni segmentatsiyalash uchun ishlatish uchun
o zgartirdik. Taklif etilgan arxitektura 2.15-rasmda ko‘rsatilgan.
ʻ
Tarmoq nomidagi “ko‘p vazifa” ga muvofiq, mualliflar misol
segmentatsiyasini asosiy tuzilmaga o‘xshash bir nechta kichik vazifalarga
ajratadilar Shunday qilib, Dai va boshqalar tarmoqni uchta bosqichga ajratadi,
bunda har bir bosqich bitta kichik vazifa uchun javob beradi: [50]:
40](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_40.png)
![2.15-rasm: MNC: Ko‘p vazifali tarmoq kaskadlari misol segmentatsiyasi [12],
uchta kichik vazifaga bo‘lingan: chegaralovchi ramka regressiyasi, har bir
chegaraviy ramkada segmentatsiya niqobini yaratish va har bir niqobni toifalash .
1. Blok darajasidagi misollarning regressiyasi: misollar sinfga bog‘liq
bo‘lmagan chegaralovchi ramkalar bilan ifodalanadi.
2. Niqob darajasida misol regressiyasi: har bir misol uchun piksel
darajasidagi niqob bashorat qilinadi.
2. Namuna toifalari: niqob darajasida har bir misol uchun toifa yorlig‘i
bashorat qilinadi.
Har bir bosqich oldingi bosqichlarning natijalariga bog‘liq, masalan,
ikkinchi bosqichda niqobni piksel darajasida bashorat qilish uchun birinchi
bosqichning chegaralovchi ramkalari talab qilinadi. Mualliflar konvolyutsion
funksiyalarni ajratish uchun o‘z qadamlarini ishlab chiqdilar. Ushbu
konvolyutsion xususiyatlar VGG modeli [82], aniqrog‘i, birinchi 13 VGG
konvolyutsion qatlamlari yordamida olinadi. Bundan tashqari, har bir bosqich L
yo‘qotish atamasini o‘z ichiga oladi. Keyingi bosqichlar oldingi bosqichlarga
bog‘liq bo‘lgani uchun, ularning yo‘qotish shartlari ham oldingi yo‘qotishlarga
bog‘liq. Shunday qilib, yo‘qotish shartlari mustaqil emas. Shaklda. 2.16-rasmda
L
1 , L
2 va L
3 yo‘qotish shartlari bilan arxitekturaning soddalashtirilganligi
ko‘rsatilgan. Keyinchalik, har bir bosqichni batafsil tavsiflaymiz.
Quti darajasidagi masala regressiyasi. Birinchi bosqichda tarmoq
umumiy konvolyutsiya funksiyalari [50] yordamida chegaralovchi ramkalar
41](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_41.png)
![sifatida ob’yekt namunalarini taklif qiladi. Tavsiya etilgan chegara ramkalari
sinflarni hisobga oladi. Bundan tashqari, tarmoq har bir cheklov ramkasi uchun
ob’yektivlik ballini bashorat qiladi. Shuning uchun mualliflar Ren va
boshqalarning ishiga ergashadilar. [90] va lokal takliflar tarmog‘idan (LTT)
foydalaning. LTT berilgan kirish tasviriga to‘rtburchaklar xususiyatli jumlalar
to‘plamini chiqaradi, har bir jumlada ob’yekt balli mavjud. Ren va boshqalarga
ko‘ra. [90] Mualliflar bu jarayonni to‘liq konvolyutsion tarmoq bilan
modellashadi. Gapni yaratish uchun umumiy konvolyutsion xususiyatlar [90]
ustiga kichik tarmoq qo‘yiladi (2.17-rasmga qarang). Har bir toymasin oynaning
hajmini kamaytirish uchun 3x3 konvolyutsion qatlam ishlatiladi. Bu qatlamdan
keyin ikkita o‘zaro bog‘liq 1×1 konvolyutsion qatlam keladi. Biri ramkaning
joylashuvi regressiyasi uchun, ikkinchisi esa ob’yekt/ob’yekt bo‘lmagan tasnifi
uchun. Har bir joy uchun regressiya uchun langarlardan foydalaniladi.
“Ankerlar” - har xil to‘rtburchaklar shakldagi oldindan belgilangan
to‘rtburchaklar (2.17-rasmga qarang). Dai va boshqalar [50] Ren va
boshqalarning LTT yo‘qotishidan foydalanadilar. [52]. Θ barcha tarmoq
parametrlarini aniqlaganligi sababli, birinchi bosqichning L
1 yo‘qotish muddati
[50, 90] sifatida aniqlanadi:
2.16-rasm: Soddalashtirilgan MNC: Uch bosqichli arxitekturaning
soddalashtirilgan tasviri [50].
(2.19)
bu yerda B bu qadamning natijasi bo‘lib, ramkalar ro‘yxatini, shu jumladan
ularning joylashuvi va ob’yekt bo‘lish ehtimolini ifodalaydi. Bundan tashqari, i
42](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_42.png)
![– mini-to‘plamdagi bog‘lanish indeksi va p
i – i bog‘lanishning ob’yekt bo‘lish
ehtimolini ifodalaydi. GT yorlig‘i p ∗ i langarning IoU va GT chegaralovchi
ramkalariga qarab aniqlanadi. t
i chegaralovchi ramka ichidagi joyni ifodalaydi
va t
i ∗ mos keladigan musbat langarning joylashuvidir. Tasniflash yo‘qolishi L
cls
ikki sinf (ob’yekt/ob’yekt bo‘lmagan) bo‘yicha logarifmik yo‘qotishdir. (1.20)
ifodaga ko‘ra, regressiya yo‘qolishi [52] bilan berilgan:
(2.20)
Regressiya yo‘qolishi GT p
i * yorlig‘i bilan ko‘paytirilganligi sababli,
regressiya yo‘qolishi faqat ijobiy langarlar uchun yoqilgan. Ikki atama N
cls va
N
reg ikkita raqam bilan normallashtiriladi. Bundan tashqari, λ ikki yo‘qotish
o‘rtasidagi vazn parametridir, shuning uchun mualliflar uni 10 ga qo‘yishdi.
Niqob darajasida masala regressiyasi. Ikkinchi bosqich uchun kirish
ma’lumotlari birinchi bosqichdagi umumiy konvolyutsiya funktsiyalari va
bloklari. Ikkinchi bosqichning natijasi – har bir berilgan chegara ramkasi uchun
piksel darajasidagi segmentatsiya niqobi. Shu nuqtada, niqob darajasidagi misol
hali ham sinfni saqlab qoladi. Mualliflar ROI birlashmasidan foydalangan holda
har bir berilgan cheklov ramkasi uchun xususiyatni ajratib olinadi. Qiziqarli
hududning birlashishi chegaralovchi ramkaning turli o‘lchamlaridan qat’iy
o‘lchamdagi ob’yektni yaratadi. Bu o‘lcham Dai va boshqalar tomonidan 14×14
ga o‘rnatiladi. [50]. Keyin har bir blokning xususiyat xaritasini ifodalovchi
ikkita to‘liq bog‘langan qatlam qo‘shiladi. Birinchi to‘liq ulangan qatlam
o‘lchamni 256 ga qisqartiradi, ikkinchi qatlam esa piksel boshiga niqobni
qaytaradi. Olingan piksel-pikselli niqob m × m fazoviy ruxsatga ega bo‘lganligi
sababli, ikkinchi to‘liq bog‘langan qatlam m 2
chiqish neyronlaridan iborat
bo‘lib, ularning har biri GT maskasiga ikkilik logistik regressiyani amalga
oshiradi. Mualliflar m =28 dan foydalanadilar. Shunday qilib, regressiya
maskalari uchun ikkinchi L
2 yo‘qotish muddati [50] tomonidan berilgan:
(2.21)
43](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_43.png)
![bu yerda M – ikkinchi bosqich tarmog‘ining chiqishi, bu m m o‘lchamdagi
niqoblar ro‘yxati. Har bir m 2
o‘lchamli logistik regressiya chiqishi [0,1]
orasidagi qiymatlarni oladi, chunki mualliflar sigmasimon faollashtirish
funktsiyalaridan foydalanadilar. (2.21) ifodaga ko‘ra, L
2 niqob regressiyasining
yo‘qolishi ham M maskalari, ham B chegaralovchi ramkalariga bog‘liq.
Hisoblash xarajatlarini kamaytirish uchun segmentatsiya maskasi regressiyasi
uchun faqat bir nechta taklif qilingan ramkalar qo‘llaniladi.
2.17-rasm: LTT: Mintaqaviy takliflar tarmog‘i (LTT) [90] chegaralovchi
ramkalarni aniqlash uchun “langarlar” yordamida.
Nusxalar tasnifi. Uchinchi bosqich uchun kirish ma’lumotlari umumiy
konvolyutsion xususiyatlar, birinchi bosqichning bloklari va ikkinchi
bosqichning segmentatsiya maskalari. Piksel darajasidagi segmentatsiya
maskalari hali ham sinflarni hisobga olganligi sababli, uchinchi bosqich har bir
misol uchun toifa ballarini chiqaradi. Ikkinchi bosqichda bo‘lgani kabi,
mualliflar qiziqish hududlarini birlashtirib, xususiyat xaritasini chiqarish uchun
birinchi bosqichning chegaralovchi ramkalaridan foydalanadilar. Keyinchalik bu
belgi xaritasi ikkinchi bosqichning piksel darajasida segmentatsiya niqobi bilan
“maskalanadi”. Ushbu “niqoblash” Dai va boshqalar [49]ning belgilarni
maskalash strategiyasidan ilhomlangan (2.2.1-bo‘limga qarang). Shunday qilib,
maskalangan belgi xaritasi bashorat niqobining oldingi qismiga qaratilgan va
[12] sifatida aniqlanadi:
44](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_44.png)
![(2.22)
bu yerda – RoI birlashtirilgandan keyingi xususiyat xaritasi va
M
i (Θ) – ikkinchi bosqichdagi niqobni bashorat qilish (RoI hal qilinishidan oldin
o‘zgartirilgan). Mualliflar Hariharan va boshqalarning g‘oyasiga ergashgan. [70]
(2.2.1-bo‘limga qarang) va misollarni toifalarga ajratish uchun ikki yo‘lli
tarmoqdan foydalaning (2.3-rasmga o‘xshash). Niqobga asoslangan yo‘l ikki
4096 o‘lchovli to‘liq bog‘langan qatlamlardan iborat bo‘lib, ular niqoblangan
FMask funksiya xaritasiga qo‘llaniladi. Bundan tashqari, mualliflar blokga
asoslangan boshqa yo‘ldan foydalanadilar, unda birlashtirilgan RoI ob’yektlari
to‘g‘ridan-to‘g‘ri ikkita to‘liq bog‘langan 4096 o‘lchovli qatlamga
joylashtiriladi (bu yo‘l 2.15-rasmda ko‘rsatilmagan). Niqobga asoslangan yo‘l
belgili vektori to‘rtburchaklar asosidagi yo‘l belgili vektori bilan birlashtiriladi.
Ushbu birlashtirilgan xususiyat vektori tasniflagich tomonidan N +1 usulda
tasniflanadi, bu yerda N – toifalar soni (plyus fon toifasi). Blok darajasidagi yo‘l
funksiya birinchi navbatda niqob darajasidagi yo‘l bilan maskalangan hollarda
ishlatilishi mumkin. Chunki toifani bashorat qilish ham B chegaralovchi
ramkalariga (qiziqish xususiyatlari sohasini yaratish uchun ishlatiladi) va M Dai
va boshqalarni segmentlash maskalariga bog‘liq. L
3 yo‘qotish muddatini [50]
sifatida shakllantiring:
(2.23)
bu yerda C – har bir misol uchun toifalar bashorati ro‘yxatini ifodalovchi
tarmoq chiqishi.
Yakuniy mulohaza. Nihoyat, butun kaskadning yo‘qolishi – bu yo‘qotish
daraxtining oldindan belgilangan barcha a’zolarining vaznli yig‘indisi:
(2.24)
L (Θ) yo‘qotish funksiyasi tarmoq parametri Θ ga nisbatan
minimallashtiriladi. Bundan tashqari, Dai va boshqalar nazariy jihatdan mumkin
bo‘lgan orqaga tarqalish [50] ga erishish va shu bilan oldingi bosqichlardagi
bog‘liqliklarni o‘z ichiga olgan oxirigacha o‘rganishga erishish uchun
45](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_45.png)
![differensiallanuvchi RoI burilish qatlamini loyihalash. RoI birlashtiruvchi
qatlami maksimal birlashtirishdan foydalansa-da, RoI burilish qatlami xususiyat
xaritasi maydonini qirqadi va uni interpolatsiya orqali maqsadli o‘lchamga
deformatsiya qiladi.
Taklif etilayotgan neyron tarmog‘ini o‘rgatish jarayonida birinchi
bosqichda ~10 4
cheklov ramkasi qaytariladi. Ortiqcha nomzodlar sonini
kamaytirish uchun mualliflar nomzodlar o‘rtasida IoU qo‘llaniladigan maksimal
bo‘lmagan bostirishdan foydalanadilar. Maksimal bo‘lmagan rad etishning IoU
chegarasi 0,7 ga o‘rnatiladi. Eng yaxshi 300 ta sandiq ikkinchi bosqichga kirish
uchun xizmat qiladi. Ushbu 300 ta blok mashg‘ulot paytida oldinga/orqaga
tarqaladigan signallarning “yo‘llari” ni belgilaydi.
Turli bosqichlar va turli xil mos keladigan yo‘qotishlar bosqich kiritishning
turli xil etiketlanishini talab qiladi. Shuning uchun Dai va boshqalar har bir
bosqich uchun ijobiy yoki salbiy namunalarni alohida aniqlang [50]:
(1) Agar regresslangan chegara ramkasi (“langarlarga” qarab) va GT
chegara ramkasi orasidagi IoU chegaradan yuqori bo‘lsa, bu namuna ijobiy
namunadir. (2) Ikkinchi bosqichda mualliflar taklif qilingan blok va GT niqobi
orasidagi eng katta IoU ni topadilar. Agar IoU 0,5 dan katta bo‘lsa, bu taklif
qilingan blok ijobiy hisoblanadi va niqob regressiyasining yo‘qolishiga hissa
qo‘shadi. Aks holda, regressiya yo‘qolishida maydon e’tiborga olinmaydi.
Niqob regressiyasining maqsadi taklif qilingan blok va m × m pikselgacha
o‘zgartirilgan GT maskasi o‘rtasidagi kesishishdir. (3) Uchinchi bosqichda
mualliflar ijobiy/salbiy namunalarning ikki xil to‘plamini ko‘rib chiqadilar.
Birinchi to‘plamda GT chegara ramkalari 0,5 dan katta IoU bo‘lgan har bir
niqob ijobiy, aks holda salbiy. Ikkinchi to‘plamda GT chegaralovchi ramkalari
bo‘lgan IoU va GT segmentatsiya maskalari 0,5 dan katta bo‘lgan IoUlar ijobiy
hisoblanadi. Qolgan namunalar salbiy. Shuning uchun uchinchi bosqich
yo‘qotish funksiyasi ikkita ( N +1) yo‘l tasniflagichini o‘z ichiga oladi. Birinchisi
misollarni niqob darajasida tasniflash uchun javobgardir, ikkinchisi esa blok
darajasida misollarni tasniflash uchun javobgardir (ularning ballari xulosa
46](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_46.png)
![chiqarish uchun ishlatilmaydi). Mualliflar ushbu ikkita klassifikatordan
foydalanadilar, chunki blok darajasidagi IoU, agar taklif qilinayotgan blok
haqiqiy misol bo‘lmasa (masalan, fonda yoki GT bilan yomon o‘xshash bo‘lsa)
ishonchliroq bo‘ladi.
2.18-rasm: 5 bosqichli kaskad: 3 bosqichli kaskaddan tashqari, 3-bosqichda
blok regressiya qatlami tomonidan yangilangan chegara ramkalari 4-bosqichga
kirish sifatida ishlatiladi [50].
Umumiy funksiyalar VGG modeliga asoslangan (1.3-bo‘limga qarang).
Xususan, mualliflar umumiy konvolyutsion qatlamlarni ishga tushirish uchun
ImageNet ma’lumotlar to‘plamida oldindan tayyorlangan VGG modelidan
foydalanadilar. Trening davomida quyi darajadagi xususiyatlar uchun mas’ul
bo‘lgan dastlabki etti konvolyutsion qatlamlar o‘rnatiladi va yuqori darajadagi
xususiyatlar uchun mas’ul bo‘lgan qolgan VGG qatlamlari o‘rganiladi. MNC
modelidagi qo‘shimcha qatlamlar tasodifiy ishga tushiriladi. Trening davomida
Dai va boshqalar. 1 ta rasm, birinchi qadam uchun 256 ta tanlangan langar va
ikkinchi va uchinchi bosqichlar uchun 64 ta tanlangan ROIni o‘z ichiga olgan
mini-paketdan foydalaning. Tasvirlarning o‘lchamlari o‘zgartirildi, shunda qisqa
tomoni 600 piksel bo‘ladi.
Ko‘p bosqichli kaskadlar. Mualliflar tarmoq kaskadini ko‘proq
bosqichlarga kengaytiradilar (2.18-rasmga qarang). Uchinchi bosqichda
klassifikator qatlamiga qo‘shimcha ravishda 4( N +1) o‘lchovli to‘liq bog‘langan
qatlam sinf bo‘yicha chegara ramkalarini regressiyalash uchun qo‘shiladi.
47](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_47.png)
![Barcha uch bosqichli tarmoq kaskadi yuqorida tavsiflanganidek o‘qitiladi.
Shunday qilib, uchinchi bosqichda nafaqat segmentatsiya niqobi bo‘yicha toifa,
balki yangi regressiv chegaralovchi ramkalar ham ko‘rsatiladi. Ushbu
cheklovchi ramkalar to‘rtinchi va beshinchi bosqichlar uchun ishlatiladi. Ushbu
bosqichlar ikkinchi va uchinchi bosqichlar bilan bir xil tuzilishga ega va yangi
maydonlar yordamida tasniflangan segmentatsiya niqoblarini chiqaradi. Xulosa
qilish jarayonida birinchi navbatda uch bosqichli tarmoq ishga tushiriladi va
yangi regressiyalangan bloklar to‘rtinchi va beshinchi bosqichlar uchun takliflar
sifatida ko‘rib chiqiladi. Bu esa 2.18-rasmda ko‘rsatilgan 5 bosqichli chiqishdir.
Bu olib tashlash jarayoni takrorlanishi mumkin, lekin mualliflar bir oz daromad
qayd. Tikuvchilik mashg‘ulotlari orqali 5 bosqichli kaskad ham uchdan-
uchgacha mashq qiladi.
Amalga oshirish tafsilotlari. Ushbu bo‘limda Dai va boshqalar tomonidan
qo‘llaniladigan python+kofe qayta tatbiq etilishi haqida batafsil ma’lumot
beramiz. [50], ayniqsa mashg‘ulotlar va vaznni ishga tushirish variantlarida.
Og‘irlikni ishga tushirish. MNC xususiyati ekstraktori VGG-16
parametrlari bilan ishga tushirilgan. Qolgan barcha qatlamlarning og‘irligi nolga
yoki Gauss taqsimoti yordamida ishga tushiriladi. Boshqa qatlamlarning barcha
ofsetlari nolga tenglashtiriladi.
1-bosqichda LTT og‘irliklari standart og‘ishi 0,01 bo‘lgan Gauss taqsimoti
yordamida ishga tushiriladi. 2 va 4-bosqichlarda niqob regressiya qatlami
og‘irliklari standart og‘ish 0,001 bilan ishga tushiriladi. 3-bosqichda va 5-
bosqichda niqobning birinchi toifalash qatlamlarining vaznlari noldan boshlab
ishga tushiriladi. Yangi chegara ramkalarini taklif qilish uchun mas’ul bo‘lgan 3
va 5-bosqichlardagi to‘liq bog‘langan qatlamlar 0,001 standart og‘ish bilan ishga
tushiriladi. 3 va 5-bosqichlardagi oxirgi to‘liq bog‘langan qatlamlar 0,01
standart og‘ish bilan ishga tushiriladi.
O‘qitish imkoniyatlari. O‘rganishning eng muhim parametrlaridan biri
o‘rganish tezligidir [19, 294]. O‘rganish tezligi mashg‘ulot paytida vaznning
yangilanishiga ta’sir qiladi ((1.15) ifodaga qarang). Bizning asosiy o‘rganish
48](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_48.png)
![darajasi η
b – 0,001 va ma’lum qadamlardan so‘ng o‘rganish tezligini kamaytirish
uchun kafening bosqichma-bosqich o‘rganish tezligi siyosatidan foydalanamiz.
Shunday qilib, o‘rganish tezligi har bir iteratsiyada g ga kamayadi:
(2.25)
bu yerda γ=0,1 va s =20 000 ni o‘rnatdik. Joriy iteratsiya i
c tomonidan
aniqlanadi va [·] qiymatni pastga aylantiradi. Hammasi bo‘lib tarmog‘imizni 25
000 iteratsiyaga o‘rgatamiz. Shunday qilib, bizning o‘rganish darajasi dastlabki
20 000 iteratsiya uchun 0,001 da qoladi va oxirgi 5 000 iteratsiya uchun 4.25
dan 0,0001 gacha bo‘lgan ifodaga muvofiq kamayadi.
Bunga qo‘shimcha ravishda, katta og‘irliklarni biroz jazolash uchun 0,0005
kichik vaznni pasaytirish qiymatidan foydalanamiz. o‘rganishni tezlashtirish
uchun α=0,9 bo‘lgan impulsdan foydalanamiz.
Kuchsiz nazorat bilan o‘qitishlar. Bizning erkin boshqariladigan
yondashuvimiz Dai va boshqalarning 5 bosqichli tarmog‘iga asoslangan. [50].
Arxitekturani qisqacha sarhisob qiladigan bo‘lsak, ushbu tarmoq misol
segmentatsiyasi uchun besh bosqichga bo‘lingan:
1-bosqich cheklov ramkalarini taklif qiladi;
2-bosqich har bir cheklov ramkasi uchun segmentatsiya niqobini taklif
qiladi;
3-bosqich har bir niqobni tasniflaydi va yangi chegara ramkalarini taklif
qiladi;
4-qadam har bir cheklovchi ramka uchun segmentatsiya niqobini taklif
qiladi;
5-bosqich har bir yangi niqobni tasniflaydi.
49](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_49.png)
![III-BOB. CHORRAHALARDA TRANSPORT VOSITALARI
OQIMINI AVTOMATIK HISOBLASH YONDASHUVI ISHLAB
CHIQISH
3.1. Kalman filtri
Kalman filtri [108] ko plab kuzatuv va ma lumotlarni bashorat qilishʻ ʼ
vazifalari uchun optimal yechim sifatida qabul qilingan [109]. Vizual harakatni
tahlil qilishda qo llaniladigan yondashuv hisoblandi. Filtri o rtacha kvadratik
ʻ ʻ
xato minimallashtiruvchisi sifatida tuzilgan, lekin filtrning maksimal ehtimollik
statistikasiga qanday bog liqligini ko rsatadigan alternativ hosila ham taqdim
ʻ ʻ
etilgan. Ushbu hosilani hujjatlashtirish o quvchiga filtr ichidagi statistik
ʻ
tuzilmalar haqida qo shimcha ma lumot beradi. filtrning maqsadi signaldan
ʻ ʼ
kerakli ma lumotni olish, qolgan hamma narsaga e tibor bermaslikdir. Filtrning
ʼ ʼ
bu vazifani qanchalik yaxshi bajarishini xarajat yoki yo qotish funksiyasi
ʻ
yordamida o lchash mumkin. Darhaqiqat, biz filtrning maqsadini ushbu
ʻ
yo qotish funksiyasini minimallashtirish deb belgilashimiz mumkin.
ʻ
O rtacha kvadrat xatolik
ʻ
Ko pgina signallarni quyidagi tarzda tavsiflash mumkin;
ʻ
(3.1)
bu yerda ; - vaqtga bog liq kuzatilgan signal,
ʻ — kuchayish atamasi, -
ma lumot tashuvchi signal va
ʼ — qo shimcha shovqin. ʻ
Umumiy maqsad ni baholashdir. va bahosi o rtasidagi farq deyiladi;
ʻ
(3.2)
ning o ziga xos shakli ilovaga bog liq, ammo funktsiya aniq ham
ʻ ʻ
musbat, ham monoton bo lishi [3] kerak. Ushbu xususiyatlarni ko rsatadigan
ʻ ʻ
xato funktsiyasi kvadrat xato funktsiyasidir.
(3.3)
52](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_52.png)
![ning kutilayotgan o zgarishi Gauss taqsimoti sifatida eng yaxshiʻ
modellashtirilganda qo llaniladi. Bunday holda, MSE
ʻ signalining ehtimolini
maksimal darajada oshiradigan qiymatini ta minlashga xizmat qiladi.
ʼ
Quyidagi hosilada optimal o rtacha kvadratni minimallashtiradigan barcha
ʻ
mumkin bo lgan filtrlar to plamidan o sha filtr sifatida belgilanadi.
ʻ ʻ ʻ
Kalman filtri Kalman tilini muhokama qilishdan oldin Norbert Viner [4]
ishini e tirof etish kerak. Wiener o rtacha kvadratik xato ma nosida optimal
ʼ ʻ ʼ
impulsni filtrini tasvirlab berdi. Uning Yechim bu erda muhokama qilinmaydi,
garchi u Kalman filtr bilan ko p umumiyliklarga ega. Aytish joizki, uning
ʻ
yechimi avtomatik korrelyatsiyadan ham, qabul qilingan signalning asl
ma lumotlar bilan o zaro bog liqligidan ham foydalanadi, bunda impuls javobini
ʼ ʻ ʻ
olish mumkin. Kalman, shuningdek, optimal MSE filtrining retseptini taqdim
etdi. Biroq Kalmanning retsepti Vayner retseptidan ba zi afzalliklarga ega; u
ʼ
filtrning impulsli javobini aniqlash zaruratini chetlab o tadi, bu raqamli
ʻ
hisoblash uchun juda mos emas. Kalman o z filtrini sta kosmik texnikasidan
ʻ
foydalangan holda tasvirlab berdi, bu Wienerning tavsifidan farqli o laroq,
ʻ
filtrdan silliqroq, filtr yoki bashoratchi sifatida foydalanishga imkon beradi.
Ushbu uchtasining oxirgisi, Kalman filtrining ma lumotlarni bashorat qilish
ʼ
uchun foydalanish qobiliyati juda foydali funktsiya ekanligini isbotladi. Bu
Kalman filtrining kuzatuv va navigatsiya muammolarining keng doirasiga
qo llanilishiga olib keldi. filtrni qiymat makon usullari nuqtai nazaridan
ʻ
aniqlash, shuningdek, filtrni diskret domenda amalga oshirishni soddalashtiradi,
bu uning keng tarqalganligining yana bir sababidir.
Qiymatlar fazosida hosilasi
Faraz qilaylik, biz shakl jarayonida o zgaruvchining qiymatini
ʻ
bilmoqchimiz;
(3.10)
BU yerda — jarayonning k vaqtdagi holat vektori, (nx1); jarayonning k
holatidan k+1 holatiga o tish holati matritsasi bo lib, vaqt o tishi bilan statsionar
ʻ ʻ ʻ
54](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_54.png)
![3.27 ifoda Kalmanning daromad ifodasidir. 3.17 bog liq o lchov bashoratiʻ ʻ
kovariatsiyasiga ega.
3.28
Endilikda , 3.27 tenglamani 3.23 ga almashtirish qo’llaymiz
(3.29)
3.29-ifoda optimal yechimga ega bo lgan xato kovariatsiyasi matritsasi
ʻ
uchun yangilanish tenglamasidir. Uchta 3.16, 3.27 va 3.29 tenglamalar
o zgaruvchisining taxminini ishlab chiqiladi.
ʻ
3.2 DEEPSort algoritmi
Harakatni boshqarish va Kalman filtrlash tizimi asosan [122] dagi asl
formula bilan bir xil. Biz juda umumiy kuzatuv stsenariysini taxmin qilamiz, bu
erda kamera kalibrlanmagan va bizda ego-harakat ma lumotlari mavjud emas.
ʼ
Ushbu holatlar filtrlash tizimiga qiyinchilik tug dirsa-da, bu so nggi bir nechta
ʻ ʻ
ob ektni kuzatish benchmarklarida ko rib chiqilgan eng keng tarqalgan
ʼ ʻ
sozlamalardir [125]. Shunday qilib, bizning kuzatuv stsenariyimiz sakkiz
o lchovli holat bo shlig ida (u, v, g, h, x,˙ y,˙ g, ˙ h˙) aniqlangan bo lib, u
ʻ ʻ ʻ ʻ
cheklovchi qutining markaziy holatini (u, v), tomonlar nisbati g ni o z ichiga
ʻ
oladi. , balandligi h va tasvir koordinatalarida ularning tegishli tezligi. Biz
doimiy tezlik harakati va chiziqli kuzatish modeliga ega standart Kalman
filtridan foydalanamiz, bu erda obyekt holatini to g ridan-to g ri kuzatish
ʻ ʻ ʻ ʻ
sifatida chegaralovchi koordinatalarni (u, v, g, h) olamiz.
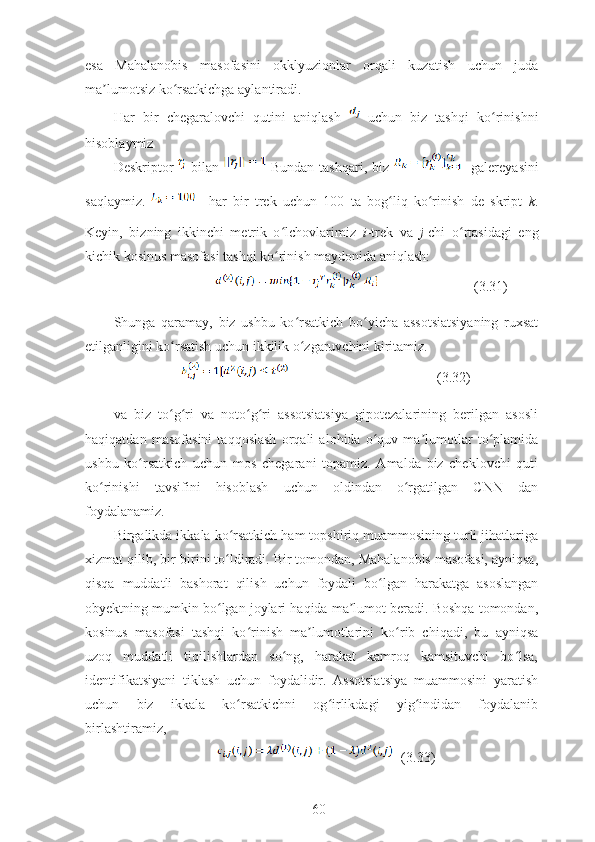
Har bir trek uchun k biz oxirgi muvaffaqiyatli o lchov assotsiatsiyasi ak
ʻ
buyon ramkalar sonini hisoblaymiz. Ushbu hisoblagich Kalman filtrini bashorat
qilish paytida oshiriladi va trek o lchov bilan bog langanda 0 ga tiklanadi.
ʻ ʻ
Oldindan belgilangan maksimal A
max yoshidan oshgan treklar sahnani tark etgan
deb hisoblanadi va trek to plamidan o chiriladi. Mavjud trekka bog lanishi
ʻ ʻ ʻ
mumkin bo lmagan har bir aniqlash uchun yangi trek gipotezalari boshlanadi.
ʻ
Ushbu yangi treklar dastlabki uchta kadrda taxminiy deb tasniflanadi. Bu vaqt
58](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_58.png)
![Bugungi tez sur atlar bilan rivojlanayotgan dunyoda transport kundalikʼ
hayotning muhim qismidir. So nggi statistik ma lumotlarga ko ra, 2023 yil
ʻ ʼ ʻ
oxiriga kelib butun dunyo bo ylab taxminan 1,45 milliard avtomobil bo lishi
ʻ ʻ
kutilmoqda, ularning qariyb 1,1 milliardi yengil avtomobillar sifatida
tasniflanadi. Shu sababli, shahar markazlarida transport muammolari deyarli
kuchayadi. Yo l harakati tirbandligi [
ʻ 1 08 ] ko plab shaharlardagi asosiy ʻ
muammo bo lib, kechikishlar, umidsizlik va yo lovchilar uchun hayot sifatining
ʻ ʻ
pasayishiga olib keladi. Ushbu muammoni to g ri hal qilish uchun bir qancha
ʻ ʻ
rivojlangan davlatlar, jumladan Amerika Qo shma Shtatlari, Janubiy Koreya va
ʻ
Yaponiya [ 109 , 110 ], aqlli transport tizimlarini (ITS) o rnatishni boshladilar
ʻ
[ 111 , 112 , 113] . ITSlar transport oqimini yaxshilash, haydovchilarni real vaqt
rejimida axborot bilan ta minlash va muqobil transport turlaridan foydalanishni
ʼ
rag batlantirish orqali shaharlardagi tirbandlikni sezilarli darajada kamaytirish
ʻ
imkoniyatiga ega. Ushbu strategiyalarni amalga oshirish orqali shaharlar
transport tizimlarining umumiy samaradorligini oshirishi, tirbandlikni
kamaytirishi va aholisining hayot sifatini yaxshilashi mumkin. Harakatni
samarali boshqarish transport oqimi va hajmi to g risida aniq va o z vaqtida
ʻ ʻ ʻ
ma lumotlarni talab qiladi, bu ma lumotlarni transport vositalarini hisoblash va
ʼ ʼ
kuzatish orqali olish mumkin. Avtotransport vositalarini hisoblash yo l harakati
ʻ
boshqaruvining muhim tarkibiy qismidir, ayniqsa tirbandlik
sharoitida. Avtotransport vositalarini to g ri hisoblash transportni
ʻ ʻ
rejalashtiruvchilarga yo l harakati shakllarini tushunishga va harakatni
ʻ
boshqarish strategiyalari bo yicha ongli qarorlar qabul qilishga imkon beradi.
ʻ
ITSning asosiy komponentlari avtomobilni tanib olish va hisoblashdir
Tadqiqotchilar va muhandislar svetofor signallarining samaradorligini oshirish
va tirbandlikni kamaytirish uchun aqlli transport tizimlarini yaratmoqda. Ushbu
muammolarni hal qilish uchun bir qancha ilmiy va eksperimental tadqiqotlar
olib borildi. Bundan tashqari, videokuzatuv kabi ma lumotlar manbalarining
ʼ
ko payishi transport vositalarini hisobga olish va monitoring tizimini samarali
ʻ
qurish imkonini beradi. Ushbu sohadagi so nggi o zgarishlar ko chalarda
ʻ ʻ ʻ
62](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_62.png)
![transport vositalarini hisoblash va kuzatishning yangi va aniqroq usullariga olib
keldi. Misol uchun, tadqiqotchilar mashinani o rganishning yangi algoritmlariniʻ
ishlab chiqdilar [ 117 , 11 8 , 119 ] avtomobillarni real vaqtda, hatto qiyin
sharoitlarda ham aniq aniqlashi va hisoblashi mumkin. Boshqa tadqiqotchilar
mobil qurilmalardan real vaqtda trafik ma lumotlarini [
ʼ 120 ,121 ] to plash ʻ
uchun kraudsorsingdan foydalanishni o rganishdi , bu esa trafikni boshqarish
ʻ
bo yicha qarorlar qabul qilish uchun ishlatilishi mumkin.
ʻ Yo l harakati kuzatuvi ʻ
videolari yordamida transport vositalarini kuzatish ikki qismdan iborat: aniqlash
va hisoblash.Chuqur o rganish ob ektini aniqlash, ramka farqi, optik oqim va
ʻ ʼ
fonni olib tashlash [122, 123 ] avtomobilni tanib olish uchun ishlatilgan. Biroq,
bu usullar katta ma lumotlar to plamini talab qiladi va yo l harakati kuzatuvi
ʼ ʻ ʻ
videolari yordamida amalga oshirish qiyin. Kuzatuv va aniqlash hududlari
transport vositalarini hisoblashning asosiy komponentlari hisoblanadi . Aniqlash
uchun videoda avtomobillar tegishli hududda harakatlanayotganligini aniqlash
uchun simulyatsiya qilingan aniqlash hududi yaratiladi. Bo laklarni saqlash yoki
ʻ
tekis chiziqda haydash qiyin; shuning uchun avtomobil tez-tez mintaqadan
tashqariga tushadi. Aksincha, kuzatuv har bir video kadrdagi har bir avtomobil
yo nalishidan foydalangan holda aniqlaydi va hisoblaydi. Bu juda aniq, ammo
ʻ
hisoblash qimmat. Shu sababli, bu jihatlar tadqiqotchilar tomonidan o rganilishi
ʻ
kerak bo lgan muhim mavzular bo lib qolmoqda [
ʻ ʻ 124 ]. Chuqur o rganish va ʻ
boshqa yutuqlarga qaramay, transport vositalarini hisoblash va harakatni
boshqarish uchun monitoring usullaridan foydalanishda ba zi cheklovlar
ʼ
qolmoqda. Misol uchun, ba zi usullarni keng miqyosda amalga oshirish qimmat
ʼ
bo lishi mumkin, boshqalari esa muayyan muhitda mos kelmasligi mumkin.
ʻ
Bundan tashqari, ba zi texnikalarning aniqligiga ob-havo sharoiti, avtomobil
ʼ
tezligi va yo lning joylashishi kabi omillar ta sir qilishi mumkin. Umuman
ʻ ʼ
olganda, muvaffaqiyatli ma lumotlar to plami va chuqur o rganish
ʼ ʻ ʻ
yondashuvlarini qo llash orqali avtomobilni kuzatish, aniqlash va hisoblashning
ʻ
ishonchliligi va vaqt samaradorligi sezilarli darajada oshishi mumkin.
63](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_63.png)
![ Algoritmik takomillashtirish va hisoblashni optimallashtirish orqali biz
transport vositalarini hisoblash vaqtini sezilarli darajada qisqartirishga erishdik,
natijada tizim samaradorligi yaxshilandi va transport boshqaruvi va monitoringi
ilovalarida o z vaqtida qaror qabul qilish va tahlil qilish imkonini berdi.ʻ
Avtotransport vositalarini hisoblash va monitoring qilish texnikasi
mavzusiga oid mavjud adabiyotlar va ularning yo ʼ l tirbandligiga ta ʼ siri haqida
umumiy ko ʼ rib chiqamiz . So ʻ nggi yillarda transport oqimini yaxshilash ,
tirbandlikni kamaytirish va umumiy transport samaradorligini oshirish uchun
transport vositalarini hisoblash va monitoring qilish tizimlaridan foydalanishga
qiziqish ortib bormoqda . Shunday qilib , ushbu mavzu bo ʻ yicha turli xil
texnikalar , yondashuvlar va transport ma ʼ lumotlarini yig ʻ ish va tahlil qilish
tizimlarini o ʻ rganadigan juda ko ʻ p adabiyotlar mavjud . Avtotransport
vositalarini hisoblash va monitoring qilish texnikasiga oid adabiyotlar videoga
asoslangan monitoring tizimlari, radarga asoslangan tizimlar va induktiv halqa
detektorlaridan foydalanishni o z ichiga olgan keng ko lamli mavzularni o z
ʻ ʻ ʻ
ichiga oladi. Turli tadqiqot ishlari aniqlik, ishonchlilik, va trafik ma lumotlarini
ʼ
yig ish va tahlil qilishda ushbu tizimlarning samaradorligi.
ʻ Bundan tashqari,
adabiyotda transport oqimiga ta sir ko rsatishi mumkin bo lgan turli omillar,
ʼ ʻ ʻ
masalan, transport vositalari turlari, yo l harakati shakllari va yo l sharoitlari
ʻ ʻ
o rganiladi.
ʻ
Ob ektni aniqlash va kuzatish avtomobilni hisoblash modelini yaratishning
ʼ
asosiy vazifalari hisoblanadi. Ob ektni aniqlash va kuzatish uchun turli usullar
ʼ
mavjud, jumladan an anaviy mashinani o rganish va chuqur o rganish usullari.
ʼ ʻ ʻ
mualliflari toymasin oynalar va birlashtirish usullaridan foydalangan holda
avtomobilni aniqlashning aniqligini yaxshilash uchun vektorli mashina (SVM)
va SIFT algoritmlarini birlashtirdi. [126 ] da fonni olib tashlash va Gauss
aralashmasi modeliga asoslangan avtomobil lokalizatsiyasini oladigan tasvirlar
uchun aniqlash modeli taklif qilindi. Chuqur o rganish modellari, masalan,
ʻ
konvolyutsion neyron tarmoqlar ob ektlarni aniqlash va kuzatish vazifalarida
ʼ
yuqori aniqlikka erishish ko rsatilgan va istiqbolli natijalar bilan transport
ʻ
65](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_65.png)
![vositalarini hisoblash va monitoring qilishda qo llanilgan.ʻ Bundan tashqari,
[ 129 ] radar va kamera ma lumotlari bilan birgalikda ehtimollik usuli yordamida
ʼ
avtomobilni tanib olish va kuzatish modelini ishlab chiqdi. Faqat bitta bosqichni
talab qiladigan va langar nuqtalaridan foydalanishni talab qilmaydigan havo
fotosuratlarida avtomobillarni aniqlash strategiyasi [ 130 ] da taklif
qilingan. Yuqori darajadagi avtomobil atributlarini to g ridan-to g ri bashorat
ʻ ʻ ʻ ʻ
qilish uchun to liq konvolyutsion tarmoqdan foydalangan holda, transport
ʻ
vositalarini aniqlash qiyinligi multipleks kichik muammoga aylantirilishi
mumkin. Bundan tashqari, ko plab tadqiqotchilar YOLOni integratsiyalashgan
ʻ
[ 131] turli sohalarga, jumladan, transport tizimlariga. YOLO real vaqtda video
oqimlarida transport vositalarini aniqlash va mahalliylashtirish uchun ITS-larda
ishlatilishi mumkin. Shunday qilib, YOLO ni so nggi tadqiqotlarda topish
ʻ
mumkin u ITSlarni qurgan. YOLOv8 asosidagi kichik chuqur tarmoq [ 132 ] da
tarmoqdagi fazoviy birlashtirish texnikasini birlashtirish va uni real vaqt
muhitida qo llash orqali aniqlash aniqligi va tezligini oshirish uchun ishlab
ʻ
chiqilgan.
Maqola [ 133 ] transport oqimi haqida qimmatli ma lumotlarni taqdim etishi
ʼ
mumkin bo lgan video yordamida transport vositalarini hisoblash uchun asos
ʻ
yaratish uchun ob ektni aniqlash, ob ektni kuzatish va traektoriyani qayta
ʼ ʼ
ishlashdan iborat uch bosqichli jarayonni taklif qiladi. Ramka sahna yo nalishini
ʻ
yumshatishga va videolardagi qiyin vaziyatlarni boshqarishga harakat
qiladi. Boshqa tadqiqot [ 134 ] vizual kiritish yordamida transport vositalarini
aniqlash va kuzatish uchun innovatsion tizimni joriy qildi. Tizim to rtta asosiy
ʻ
bosqichni o z ichiga oladi: oldingi holatni aniqlash, tegishli xususiyatlarni olish,
ʻ
ushbu xususiyatlarni tahlil qilish va transport vositalarini hisoblash va
kuzatish. Biroq, yaratilgan algoritmlar hali ko p qirrali emas va ularning
ʻ
samaradorligi ko p jihatdan o quv ma lumotlar to plamining keng
ʻ ʻ ʼ ʻ
qamrovliligiga va ma lumotlar to plamining oddiy ish sharoitlariga qanchalik
ʼ ʻ
mos kelishiga bog liq.
ʻ Bundan tashqari, real vaqt rejimida qayta ishlash va ob-
66](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_66.png)
![3.1-rasm. Tizimning ish jarayoni
Trasnport vositalarini aniqlash modeli
Biz YOLOv8 dan bazaviy model sifatida foydalandik, chunki u
ma lumotlar to plash va tadqiqot maqsadlarimiz uchun eng mos edi.ʼ ʻ Bundan
tashqari, YOLOv8-da yangi chiqarilgan konvolyutsion neyron tarmog i real
ʻ
vaqtda ham statsionar, ham harakatlanuvchi transport vositalarini ajoyib tezlik
va aniqlik bilan aniqlay oladi. Magistral yo llarda transport oqimini aniqlash
ʻ
yuqori darajadagi aniqlik tezligini talab qiladi va modelning kichik o lchamlari
ʻ
uning resurslari cheklangan o rnatilgan tizimlarda xulosalar samaradorligiga
ʻ
ta sir qiladi.
ʼ Bizning tadqiqotimiz shuningdek, CSP (Cross-Stage Partial)
modelining imkoniyatlarini oshirishga qaratilgan [135], ayniqsa kirish video
ramkalaridan tegishli va qimmatli xususiyatlarni olishda. Ushbu
takomillashtirilgan versiyada biz kuchli YOLOv8 tarmog ini tayanch sifatida
ʻ
birlashtirdik, bu esa modelning samaradorligi va unumdorligini yanada
oshirdi. Ushbu yaxshilanishlarga erishish uchun biz xususiyatlar xaritasida
gradient modifikatsiyalarini kiritdik. Ushbu modifikatsiya ortiqcha gradient
ma lumotlari samarasizlikka olib kelishi mumkin bo lgan murakkab
ʼ ʻ
tarmoqlardagi umumiy muammoni hal qiladi. Xususiyatlar xaritasining bir qismi
68](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_68.png)
![sifatida gradient modifikatsiyalaridan foydalanish orqali biz bu muammoni
samarali ravishda bartaraf qilamiz va modelning hisoblash samaradorligini
optimallashtiramiz. Ortiqcha gradient ma lumotlarini minimallashtirish orqaliʼ
CSP modeli giperparametrlar sonini va soniyada suzuvchi nuqta operatsiyalarini
sezilarli darajada kamaytiradi. Bu ikki tomonlama ta sirga ega:
ʼ u bir vaqtning
o zida modelning umumiy hajmini kamaytirish bilan birga bashorat qilish tezligi
ʻ
va aniqligini oshiradi. Tez va aniq bashorat qilish muhim bo lgan real vaqt
ʻ
rejimida avtomobillarni hisoblash ilovalarida bu yaxshilanish juda
muhimdir. Bizning takomillashtirilgan versiyamizda biz keng ko lamli tajribalar
ʻ
asosida bo linish nisbatini yaxshi sozladik. 3.
ʻ 2-rasmda xususiyatlarning ikkita
alohida to plamga bo linishi tasvirlangan.
ʻ ʻ Birinchisi qo shimcha ʻ
takomillashtirish bosqichlaridan o tadi, ikkinchisi esa ularni chetlab
ʻ
o tadi.
ʻ Ko pgina hollarda, kirishning xususiyatlari yarmiga bo linadi ʻ ʻ
( ?????? = 0,5 ). Biroq, parametrlar sonini kamaytirish orqali tizimni tezlashtirish uchun
biz 0,25 ga tushamiz, bu esa o z navbatida soniyada kadrlarni oshiradi.
ʻ Shunga
qaramay, bu o rtacha o rtacha aniqlikni (mAP) kamaytiradi.
ʻ ʻ Bir vaqtning o zida ʻ
partiyani normallashtirish [136] mAPdagi pasayishning o rnini qoplash uchun
ʻ
tizimni oldindan tayyorlash uchun ishlatiladi.
Ko p avtomobilni soat
ʻ
Ko p avtomashinalarni vaqt taklif etilayotgan tizimning yana bir muhim
ʻ
ishlashidir. Ush sistemda DeSort algoritmi avtomobilni soat uchun, chunki u
avtomobilni onlayn qurilma jarayonini va transport yuk tashish orqali aylanib
o tishni kuchaytiradi. Kuzatish uchun biz kengni qo llaymiz va bizda
ʻ ʻ
kameraning statik fonga qarab harakat va CCTV kamerasi haqida hech qanday
ma lumot yo q deb taxmin qilamiz.
ʼ ʻ
DeepSort algoritmining yordami uchun ob ektiv elementlarni namoyon
ʼ
qiladi: harakat dinamikasi va tashkil ko rinish. Dinamika uchun yuk, nisbatlar,
ʻ
yuk yordami (ROI) va sahna koordinatalari kabi parametrlar yordamida Kalman
filtri yordamida filtrlanadi va boshorat yordam. Shunga ko ra, bu parametrlar
ʻ
kuzatuv ishining asosini tashkil qiladi. Biz tezlikda harakatlanuvchi model va
69](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_69.png)
![chiziqli harakat modeli bilan Kalman filtridan foydalandik. Ushcha modelda biz
ROI koordinatalarini avtomobil holatini kuzatuv ma lumotlari (tashqi ko rinishi)ʼ ʻ
sifatida qabul qildik. Kuzatish ma lumotlari uchun 1-jadvalda ko rsatilgan
ʼ ʻ
strukturaga ega oldindan o rgatilgan neyron tarmoqdan jo natish mumkin .
ʻ ʻ
3.2. Kirish xususiyatlari uchun CSP tuzilishi.
Ko p avtomobilni kuzatish
ʻ
Ko p avtomashinalarni kuzatish taklif etilayotgan tizimning yana bir
ʻ
muhim vazifasidir. Ushbu tizimda DeepSort algoritmi [137] avtomobilni onlayn
kuzatish uchun ishlatiladi, chunki u avtomobilni aniqlash jarayonini va transport
vositalari o rtasida aylanib o tishni kuchaytiradi. Kuzatish uchun biz keng
ʻ ʻ
yondashuvni qo llaymiz va bizda kameraning statik fonga nisbatan harakati va
ʻ
CCTV kamerasi joylashtirilganligi haqida hech qanday ma lumot yo q deb
ʼ ʻ
taxmin qilamiz.
DeepSort algoritmining ishlashi davomida ob ektlar ikkita xususiyatni
ʼ
namoyon qiladi: harakat dinamikasi va tashqi ko rinish. Dinamika uchun
ʻ
balandlik, tomonlar nisbati, qiziqish mintaqasi (ROI) va sahna koordinatalari
kabi parametrlar odatda Kalman filtri yordamida filtrlanadi va bashorat qilinadi.
70](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_70.png)
![Shunga ko ra, ushbu parametrlar kuzatuv ishining asosini tashkil qiladi. Bizʻ
barqaror tezlikda harakatlanuvchi model va chiziqli kuzatish modeli bilan
Kalman filtridan foydalandik. Ushbu modelda biz ROI koordinatalarini
avtomobil holatining kuzatuv ma lumotlari (tashqi ko rinishi) sifatida qabul
ʼ ʻ
qildik. Kuzatish ma lumotlari uchun 1-jadvalda ko rsatilgan strukturaga ega
ʼ ʻ
oldindan o rgatilgan neyron tarmoqdan foydalanish mumkin.
ʻ
Harakat ma lumotlarini kiritish uchun Kalmanning taxminiy holatlari va
ʼ
eng so nggi kuzatuv ma lumotlari o rtasidagi Mahalanobis masofasi
ʻ ʼ ʻ
foydalanilgan.
Avtomobilni hisoblash
Aksariyat hollarda zamonaviy real vaqt rejimida transport vositalarini
hisoblash tizimlari yo l sharoitlari yoki yo l harakati holatlaridan qat i nazar,
ʻ ʻ ʼ
hisoblash usullaridan foydalanadi. Masalan, tirbandlik bir nechta avtomobillarni
bitta birlik sifatida noto g ri hisoblash ehtimolini oshiradi, chunki mashinalar bir
ʻ ʻ
joyga to planib, sekin harakatlanadi.
ʻ Chiziqni aniqlashga tayanadigan usullar
yuqori tezlikda harakatlanayotgan transport vositalarini aniq hisoblash uchun
juda mos keladi, biroq ular transport vositalari bir-biriga yaqin joylashgan va
sekin harakatlanadigan tirbandlikda kurash olib borishi mumkin, bu esa qo shni
ʻ
transport vositalarini yagona birlik sifatida sanash xavfiga olib keladi. Ushbu
qiyinchilikni yengish uchun parallel chiziqni aniqlashning kengaytmasi yoki
an anaviy indüktans halqalarining simulyatsiyasi sifatida ko rish mumkin
ʼ ʻ
bo lgan simulyatsiya qilingan halqa joriy qilingan deb taxmin qilamiz.
ʻ Shuning
uchun, Bizning tizimimiz zich tirbandlik stsenariylarida hisoblash aniqligini
oshirish uchun simulyatsiya qilingan halqa texnikasidan foydalanadi va trafikni
boshqarish va tahlil qilish uchun qimmatli tushunchalarni taqdim etadi. Bizning
holatda, simulyatsiya qilingan halqa barcha yo l bo laklarini o z ichiga olgan
ʻ ʻ ʻ
ROI hisoblanadi. Og ir tirbandlikda hisoblash simulyatsiya qilingan halqa
ʻ
yondashuvlari yordamida samarali bajarilishi mumkin [1 38 , 139 ]. Bunday
stsenariylarda bir nechta transport vositalari bir-biriga mahkam o ralgan
ʻ
bo lishi, sekin harakatlanishi yoki vaqtinchalik to xtab turishi mumkin.
ʻ ʻ Ushbu
71](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_71.png)
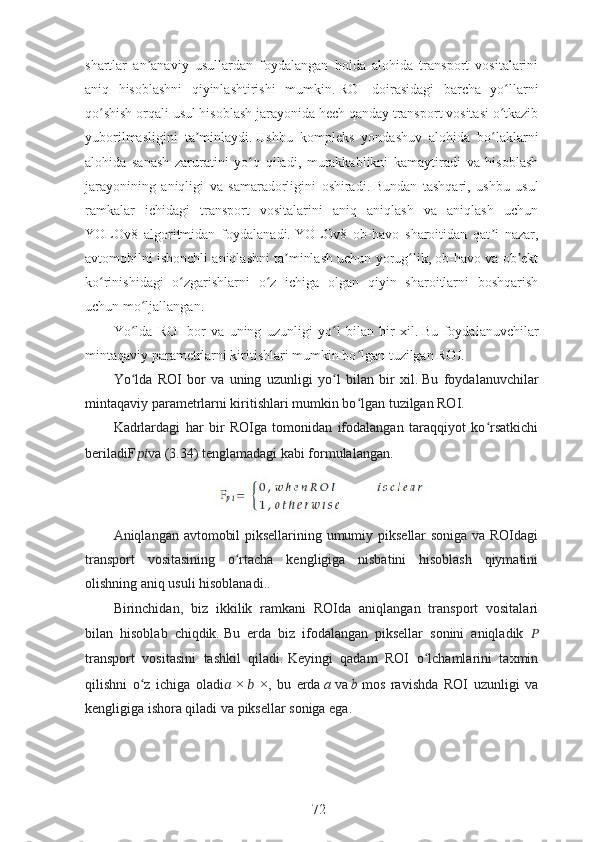

![56 M . E vering ham, S. A. E slam i, L. V an G ool, C . K . W illiam s, J.
W inn,
and Zisserman, “The Pascal Visual Object Classes Challenge: a
Retrospec- tive,” International Journal of Computer Vision , 2015.
57 I. Goodfellow, Y. Bengio, and A. Courville, Deep Learning .
MIT Press, 2016, http://www.deeplearningbook.org .
58 R. Girshick, “Fast R-KNT,” in Proceedings of the IEEE
International Con- ference on Computer Vision , 2015.
59 B .
Ha riha ran, P . A rbel´aez, L. Bo urdev, S. M aji, and J. M alik,
“Sem antic Contours from Inverse Detectors,” in Proceedings of the IEEE
International Conference on Computer Vision , 2011.
60 B.
Ha riha ran, P . A rbel´ ae z , R. G irshick, and J. M al ik,
“S im ultan eous
D e- tection and Segmentation,” in European Conference
on Computer Vision , 2014.
61 “Hypercolumns for Object Segmentation and Fine-grained Localiza-
tio,” in Proceedings of the IEEE Conference on Computer Vision and Pat-
tern Recognition , 2015.
62 S. Hong, H. Noh, and B. Han, “Decoupled Deep Neural Network
for Semi- supervised Semantic Segmentation,” in Advances in Neural
Information Pro- cessing Systems , 2015.
63 K. He, X. Zhang, S. Ren, and J. Sun, “Deep Residual Learning
for Image Recognition,” in Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition , 2016.
64 A. K. Jain, “Data Clustering: 50 Years Beyond K-Means,”
Pattern Recogni- tion Letters , 2010.
65 F. Jelinek, “Some of my Best Friends are Linguists,” Language
Resources and Evaluation , 2005.
[66] D. B. Johnson,“Efficient Algorithms for Shortest Paths in Sparse
Networks,” Journal of the ACM (JACM) , 1977.
67 Y.
Jia, E . Shelhame r, J. D ona hue, S. K arayev, J. Long, R .
G irshick, S. Guadarrama, and T. Darrell, “Caffe: Convolutional
Architecture for Fast Feature Embedding,” in Proceedings of the 22nd ACM
international confer- ence on Multimedia , 2014.
68 A.
K hor eva, R . Be nenso n, J. Hosa ng, M. H ein, and B . Schiele,
“S im ple
D oes It: Weakly Supervised Instance and Semantic Segmentation,”
in Proceedings of the IEEE Conference on Computer Vision and Pattern
Recognition , 2017.
69 S. Kwak, S. Hong, and B. Han, “Weakly Supervised Semantic
Segmentation Using Superpixel Pooling Network,” 2017.
82](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_82.png)
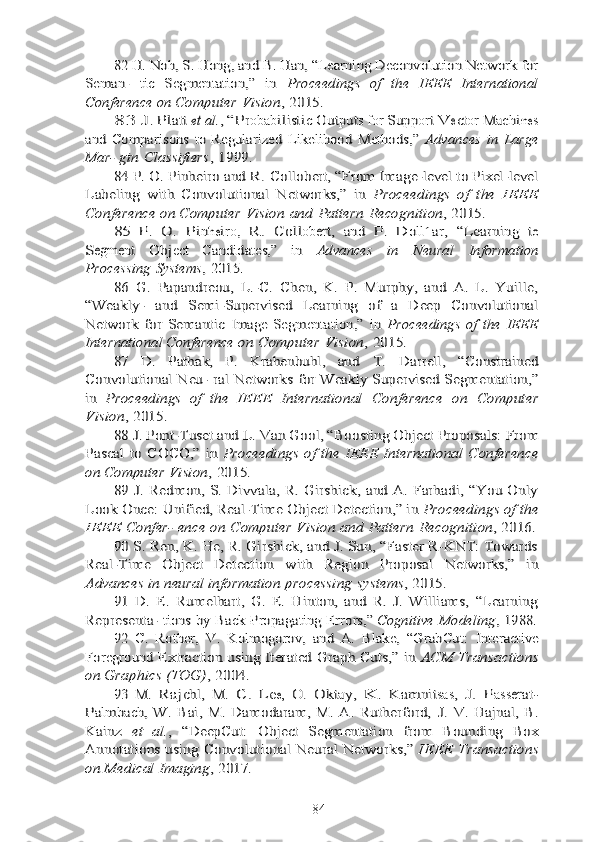
![106 W. Zhu, S. Liang, Y. Wei, and J. Sun, “Saliency Optimization
from Robust Background Detection,” in Proceedings of the IEEE
Conference on Computer Vision and Pattern Recognition , 2014.
107 J . Zha ng, S. Sclarof f, Z. L in, X. Shen, B. P rice, and R . M ech,
“M inim um Barrier Salient Object Detection at 80 NPS,” in
Proceedings of the IEEE International Conference on Computer
Vision , 2015.
108. Ghosh, B.; Dauwels, J. Comparison of different Bayesian methods for
estimating error bars with incident duration prediction. J. Intell. Transp.
Syst. 2021 , 26 , 420–431. [ Google Scholar ] [ CrossRef ]
109. Bui, K.-H.N.; Yi, H.; Cho, J. A Multi-Class Multi-Movement Vehicle
Counting Framework for Traffic Analysis in Complex Areas Using CCTV
Systems. Energies 2020 , 13 , 2036. [ Google Scholar ] [ CrossRef ]
110 Telang, S.; Chel, A.; Nemade, A.; Kaushik, G. Intelligent transport
system for a smart city. In Security and Privacy Applications for Smart City
Development ; Springer: Berlin/Heidelberg, Germany, 2021; pp. 171–187.
[ Google Scholar ]
111. Jarašūnienė, A. Research into Intelligent Transport Systems (ITS)
technologies and efficiency. Transport 2007 , 22 , 61–67. [ Google Scholar ]
[ CrossRef ]
112 Ducrocq, R.; Farhi, N. Deep Reinforcement Q-Learning for Intelligent
Traffic Signal Control with Partial Detection. Int. J. Intell. Transp. Syst.
Res. 2023 , 21 , 192–206. [ Google Scholar ] [ CrossRef ]
113 Creß, C.; Bing, Z.; Knoll, A. Intelligent Transportation Systems Using
External Infrastructure: A Literature Survey. arXiv 2021 , arXiv:2112.05615.
[ Google Scholar ] [ CrossRef ]
114 Xiang, X.; Zhai, M.; Lv, N.; El Saddik, A. Vehicle Counting Based on
Vehicle Detection and Tracking from Aerial Videos. Sensors 2018 , 18 , 2560.
[ Google Scholar ] [ CrossRef ]
86](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_86.png)
![115 Guerrieri, M.; Parla, G. Deep Learning and YOLOv3 Systems for
Automatic Traffic Data Measurement by Moving Car Observer
Technique. Infrastructures 2021 , 6 , 134. [ Google Scholar ] [ CrossRef ]
116 Chen, X.-Z.; Chang, C.-M.; Yu, C.-W.; Chen, Y.-L. A Real-Time
Vehicle Detection System under Various Bad Weather Conditions Based on a
Deep Learning Model without Retraining. Sensors 2020 , 20 , 5731. [ Google
Scholar ] [ CrossRef ]
117 Ma, R.; Zhang, Z.; Dong, Y.; Pan, Y. Deep Learning Based Vehicle
Detection and Classification Methodology Using Strain Sensors under Bridge
Deck. Sensors 2020 , 20 , 5051. [ Google Scholar ] [ CrossRef ]
118 Safarov, F.; Kutlimuratov, A.; Abdusalomov, A.B.; Nasimov, R.; Cho,
Y.-I. Deep Learning Recommendations of E-Education Based on Clustering and
Sequence. Electronics 2023 , 12 , 809. [ Google Scholar ] [ CrossRef ]
119 Liang, H.; Song, H.; Li, H.; Dai, Z. Vehicle Counting System using
Deep Learning and Multi-Object Tracking Methods. Transp. Res. Rec. J.
Transp. Res. Board 2020 , 2674 , 114–128. [ Google Scholar ] [ CrossRef ]
120 Priymak, M.; Sinnott, R. Real-Time Traffic Classification through
Deep Learning. In Proceedings of the 2021 IEEE/ACM 8th International
Conference on Big Data Computing, Applications and Technologies
(BDCAT’21), Leicester, UK, 6–9 December 2021. [ Google Scholar ]
[ CrossRef ]
121.Ji, B.; Hong, E.J. Deep-Learning-Based Real-Time Road Traffic
Prediction Using Long-Term Evolution Access Data. Sensors 2019 , 19 , 5327.
[ Google Scholar ] [ CrossRef ] [ PubMed ]
122. Wang, J.; Zheng, H.; Huang, Y.; Ding, X. Vehicle Type Recognition
in Surveillance Images from Labeled Web-Nature Data Using Deep Transfer
Learning. IEEE Trans. Intell. Transp. Syst. 2017 , 19 , 2913–2922. [ Google
Scholar ] [ CrossRef ]
123. Hofmann, M.; Tiefenbacher, P.; Rigoll, G. Background segmentation
with feedback: The Pixel-Based Adaptive Segmenter. In Proceedings of the
87](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_87.png)
![2012 IEEE Computer Society Conference on Computer Vision and Pattern
Recognition Workshops, Providence, RI, USA, 16–21 June 2012; pp. 38–43.
[ Google Scholar ] [ CrossRef ]
124. Lin, H.; Yuan, Z.; He, B.; Kuai, X.; Li, X.; Guo, R. A Deep Learning
Framework for Video-Based Vehicle Counting. Front. Phys. 2022 , 10 , 32.
[ Google Scholar ] [ CrossRef ]
125. Xiong, L.; Yue, W.; Xu, Q.; Zhu, Z.; Chen, Z. High Speed Front-
Vehicle Detection Based on Video Multi-feature Fusion. In Proceedings of the
2020 IEEE 10th International Conference on Electronics Information and
Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020; pp.
348–351. [ Google Scholar ]
126. Hamsa, S.; Panthakkan, A.; Al Mansoori, S.; Alahamed, H. Automatic
Vehicle Detection from Aerial Images using Cascaded Support Vector Machine
and Gaussian Mixture Model. In Proceedings of the 2018 International
Conference on Signal Processing and Information Security (ICSPIS), Dubai,
United Arab Emirates, 7–8 December 2018; pp. 1–4. [ Google Scholar ]
[ CrossRef ]
127. Meng, Q.; Song, H.; Zhang, Y.; Zhang, X.; Li, G.; Yang, Y. Video-
Based Vehicle Counting for Expressway: A Novel Approach Based on Vehicle
Detection and Correlation-Matched Tracking Using Image Data from PTZ
Cameras. Math. Probl. Eng. 2020 , 2020 , 1969408. [ Google Scholar ]
[ CrossRef ]
128. Tran, V.-H.; Dang, L.-H.; Nguyen, C.-N.; Le, N.-H.; Bui, K.-P.; Dam,
L.-T.; Le, Q.-T.; Huynh, D.-H. Real-time and Robust System for Counting
Movement-Specific Vehicle at Crowded Intersections. In Proceedings of the
2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition
Workshops (CVPRW), Nashville, TN, USA, 20 June 2021–25 June 2021; pp.
4223–4230. [ Google Scholar ] [ CrossRef ]
129 Liu, Z.; Cai, Y.; Wang, H.; Chen, L.; Gao, H.; Jia, Y.; Li, Y. Robust
target recognition and tracking of self-driving cars with radar and camera
88](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_88.png)
![information fusion under severe weather conditions. In Proceedings of the IEEE
Transactions on Intelligent Transportation Systems, Indianapolis, IN, USA, 19–
22 September 2021; pp. 1–14. [ Google Scholar ]
130 Shi, F.; Zhang, T.; Zhang, T. Orientation-Aware Vehicle Detection in
Aerial Images via an Anchor-Free Object Detection Approach. IEEE Trans.
Geosci. Remote Sens. 2021 , 59 , 5221–5233. [ Google Scholar ] [ CrossRef ]
Chop etilgan ilmiy to plam, jurnal va gazetalar:ʻ
131. Chorrahalarda transport vositalari oqimini avtomatik hisoblashning
kompyuterli ko`rishga asoslangan dasturiy vositasini ishlab chiqishning samarali
jihatlari tahlili Published online: 30 October 2022 The Author(s), under
exclusive licence to Springer-Verlag London Ltd., part of Springer Nature 2022
[B-336-338];
132. Chorrahalarda transport oqimini avtomatik hisoblash uchun
kompyuterli ko‘rishga asoslangan dasturiy ta’minotni ishlab chiqishning
asoslari. Algoritimlar va dasturlashning muammolari mavzusidagi xalqaro
ilmiy-amaliy anjuman 19-20 may 2023 Qarshi [B-176-178];
Internet manbalari:
133. www.ziyouz.com
134. www.google scolar.com
135. www.literature.uz
136 www.gulduportal.uz
89](/data/documents/2dbbf6d8-3af8-4af7-925b-b145c3a1a85a/page_89.png)
CHORRAHALARDA TRANSPORT VOSITALARI OQIMINI AVTOMATIK HISOBLASHNING KOMPYUTERLI KO‘RISHGA ASOSLANGAN DASTURIY VOSITASI NI ISHLAB CHIQISH ANNOTATSIYA Mazkur ishda chorrahalarda harakatlanayo tgan transportlarning oqimini hisoblashga qaratilgan. Sun’iy intellektga (AI) asoslangan tasvirni qayta ishlash texnologiyasining o‘sishi tufayli kamera ko‘rish ma’lumotlaridan foydalangan holda oqimni kuzatish tizimlarini ishlab chiqishga qiziqish ortib bormoqda. Ushbu tadqiqot yo‘llarni kuzatish tizimini takomillashtirish uchun chorrahada o‘rnatilgan kamera yordamida yo‘l harakati ma’lumotlarini olish usulini taqdim etadi. Usul transport vositasini aniqlash va avtomobil turini tasniflash uchun tasvirni qayta ishlash uchun chuqur o‘rganishga asoslangan yondashuvdan (YOLOv8) foydalanadi. Bo‘lak bo‘ylab transport vositalarining traektoriyalari aniqlangan transportning joylarini yuqori aniqlikdagi aniqlaydi moslashtirish orqali baholanadi. Transportning taxminiy traektoriyalariga asoslanib, har bir bo‘lak bo‘ylab harakatlanish yo‘nalishidagi harakat hajmi va har bir bo‘lakning navbat uzunligi taxmin qilinadi. Taklif etilgan usulning ishlashi baholash mezonlari bo‘yicha namunalar bilan sinovdan o‘tkazildi: Transportni aniqlash, transport vositasi turini tasniflash, traektoriyani bashorat qilish, transport hajmini baholash va navbat uzunligini baholash. Natijalar transport turlarini tasniflashda va qatorlar bo‘ylab harakatlanish hajmini baholashda 20% dan kam xatoliklarga ega bo‘lgan 99% transport vositasini aniqlash samaradorligini ko‘rsatad. Demak, ushbu tadqiqotda taklif etilgan usul chorrahada o‘rnatilgan kamera yordamida yo‘l harakati to‘g’risida batafsil ma’lumot to‘plashning maqsadga muvofiqligini ko‘rsatadi. AI yondashuvi ushbu tadqiqotning asosiy hissasi bo‘lib, u oqimni monitoring qilishni takomillashtirishning yuqori imkoniyatlarini beradi. ANNOTATION There are various means of monitoring traffic situations on roads. Due to the rise of artificial intelligence (AI) based image processing technology, there is a growing interest in developing traffic monitoring systems using camera vision 1
data. This study provides a method for deriving traffic information using a camera installed at an intersection to improve the monitoring system for roads. The method uses a deep-learning-based approach (YOLOv8) for image processing for vehicle detection and vehicle type classification. Lane-by-lane vehicle trajectories are estimated by matching the detected vehicle locations with the high-definition map (HD map). Based on the estimated vehicle trajectories, the traffic volumes of each lane-by-lane traveling direction and queue lengths of each lane are estimated. The performance of the proposed method was tested with thousands of samples according to five different evaluation criteria: vehicle detection rate, vehicle type classification, trajectory prediction, traffic volume estimation, and queue length estimation. The results show a 99% vehicle detection performance with less than 20% errors in classifying vehicle types and estimating the lane-by-lane travel volume, which is reasonable. Hence, the method proposed in this study shows the feasibility of collecting detailed traffic information using a camera installed at an intersection. The approach of combining AI techniques is the main contribution of this study, which shows a high chance of improving current traffic monitoring systems. MUNDARIJA KIRISH …………………………………………………………………… 7 I BOB INTELLEKTUAL TRANSPORT TIZIMLARI VA ULARDA QO‘LLANILADIGAN USULLAR………………. 10 1.1. Intellektual transport tizimlari tahlili…………………………… 1 0 1.2. Intellektual transport tizimlarida qo‘llaniladigan asosiy usullar.. 15 2
II BOB VIDEO MA`LUMOTLARDAN OLINGAN TASVIRLARDA OBYEKTLARNI SEGMENTATSIYALASH USUL VA ALGORITMLARI… 22 2.1. Blok segmentatsiyasidan foydalaniladigan asosiy chiziqlar…… 22 2.2. Sun'iy intellekt soxasida Kalman filtri…………………………. 43 III BOB CHORRAHALARDA TRANSPORT VOSITALARI OQIMINI AVTOMATIK HISOBLASH YONDASHUVI ISHLAB CHIQISH…………………………………………… 55 3.1. Kalman filtri……………………………………………………. 55 3.2. DEEPSort algoritmi…………………………………………….. 6 0 3.3 Transport vositalar oqimini avtomatik aniqlash yondashuvi 64 XULOSA … …………………………………………… …………………. 75 FOYDALANILGAN ADABIYOTLAR RO‘YXATI …......….………... 78 KIRISH Mavzuning asoslanishi va uning dolzarbligi. Intellektual transport tizimlarini ishlab chiqish fan va texnikaning turli sohalaridan ko plabʻ mutaxassislarni jalb qilishni talab qiladi, chunki ularni amalga oshirish ilg or ʻ dasturiy ta minot va texnik vositalarni ishlab chiqishni, katta ma lumotlarni ʼ ʼ tahlil qilish va qayta ishlashni, shuningdek tizimlarning har xil turdagi uskunalar 3
bilan o zaro ta sirini talab qiladi. ʻ ʼ Bu, o z navbatida, potentsial ish o rinlari ʻ ʻ yaratib, jamiyatning innovatsion rivojlanishiga xizmat qiladi. Intellektual transport tizimlarining yana bir afzalligi ularning mavjudligi va foydalanuvchilar uchun qulayligidir. Buning sababi, aksariyat ITS iOS va Android platformalarida qo llab-quvvatlanadigan mobil ilovalarga ega, buning ʻ yordamida foydalanuvchilar real vaqt rejimida o zlarining harakatchanligini ʻ nazorat qilishlari mumkin. Intellektual transport tizimlari tovarlarni tashish xarajatlarini sezilarli darajada kamaytirishi mumkin, bu logistika yoki sanoat korxonalarida tovarlarni etkazib berish bilan shug ullanadigan har bir kishi uchun ayniqsa muhimdir. ʻ Buning sababi shundaki, Intellektual transport tizimlari interaktiv xarita yoki marshrutlarda tovarlarni optimal taqsimlashni ta minlay oladi, yo lda xavfli ʼ ʻ vaziyatlardan ogohlantiradi va yuklarni tashishni tezlashtiradi, ishlamay qolish vaqtini kamaytiradi. Tadqiqot obyekti va predmeti. Tadqiqotning obyekti bo lib, chorralardagi ʻ tasvirlar oqimi hisoblanadi. Tadqiqotning predmeti bo lib bo lib, tasvirlarga ʻ ʻ ishlov berish va tahlil qilish olish usul, algoritm va dasturlarda iborat. Tadqiqotning maqsadi va vazifalari. Ishning asosiy maqsadi transport vositalari mavjud tasvirlar oqimiga ishlov berish va tahlil qilishning kompyuterli ko rish usullari tadqiq etilib, transport vositalari oqimi avtomatik aniqlash ʻ yondashuvini ishlab chiqishdan iborat. Tadqiqot maqsadini amalga oshirishda uchun quyidagi vazifalar belgilangan: tasvirlar asoslari o rganish va tahlil etish; ʻ transport vositalari tasvirlari asosida transport oqimini hisoblash masalasini yechish bosqichlarini ishlab chiqish; chuqur o qitishga asoslangan model va algoritmlari o rganish va uni ʻ ʻ tasvirlar oqimiga qo llash; ʻ tasvirlarda transport vositalari aniqlashning chuqur sun iy neyron tarmoq ʼ modelini qurish; 4
tasvirlar oqimida joylashuvini aniqlangan obyektlarni identifikasiyalash usul va algoritmlari tadqiq etish; tasvirlar oqimida transport oqimlari hisoblash yondashuvini ishlab chiqish. Tadqiqotning ilmiy yangiligi. Magistrlik dissertatsiyasida olingan natijalar ilmiy-amaliy xarakterga ega bo lib, YOLOv8 neyron tarmoq modeli,ʻ DeepSort va Kalman filtri asosida chorrahalarda transport vositalari oqimini avtomatik hisoblash yondashuvi ishlab chiqilgan. Ushbu yondashuvni amaliy jihatdan tajriba o tkazish maqsadida Python dasturlash tilida dasturi ishlab ʻ chiqilgan. Tadqiqotning asosiy masalalari va farazlari. Magistrlik dissertatsiyasida asosan quyidagi bosqichlar amalga oshiriladi. Ishda qo yilgan masalani yechish mavjud usullar tahlil etilib, model va ʻ algoritmlarni ishlab chiqish va dasturiy modulini yaratish bunda: tasvir sifatini oshirish usullari asosiy tushunchalari o rganish va ʻ masala qo yilishi shakllantirish; ʻ tasvirlarda obyektlarni segmentasiya qilish usul va algoritmlarini tadqiq etish; tasvirlardagi aniqlangan obyektlarni tasniflashning chuqur neyron tarmoq modeli arxitekturasini qurish ; tasvirlardagi tasniflangan obyektlar identifikasiyalashni DeepSort va Kalman filtriga asoslangan algoritmi ishlab chiqish. ishlab chiqilgan yondashuvda tajriba-sinovlar o tkazish. ʻ Adabiyotlar sharhi va tahlili. Ilmiy tadqiqotni olib borish jarayoni va dissertatsiya ishini yozishda foydalanilgan adabiyotlarning tahlilini keltiramiz. [1]–[30] adabiyotlardan mavzuning dolzarbligi uchun foydalanildi va [2]–[47] adabiyotlardan esa asosiy tushunchalar, tibbiy tasvirlarga ishlov berish usullari o rganish olindi. [1] – [21] adabiyotlardan I bobda keltirilgan ma lumotlarni ʻ ʼ bayon qilishda foydalanildi. [50] – [120] adabiyotlardan ishda tadqiq qilingan masalalarning algoritmlarini tuzishda foydalanildi. Dissertatsiyada olingan natijalar [93] – [94] adabiyotlarda e lon qilingan. ʼ 5