Terminal boshqarish masalasi uchun maksimum prinsipi.

![1. Terminal boshqarish masalasi. Maksimum prinsipi.
Boshqarish obyekti
(1)
vektorli differensial tenglama bilan berilgan bo’lsin, bu yerdax=(x1,...,xn),u=(u1,...,um), f=(f1,...,fn), fi(x,u,t)
funksiyalarni fixj(x,u,t) hususiy
hosilalari bilan birga uzluksiz deb hisoblaymiz. Joyiz boshqarishlar
[t0,t1] oraliqda
aniqlangan bo’lakli uzluksiz va
V ⊂Rm to’plamdan qiymatlar qabul qiluvchi
u=u(t) m– vektor funksiyalardan iborat. (1) tenglamaning har bir u=u(t) joyiz
boshqarishga mos
x= x(t) joyiz trayektoriyasi
(2)
shartni qanoatlantiradi. Qaralayotgan obyektni boshqarish
(3)
terminal kriteriy orqali sifat jihatidan baholanadi, bu yerda
ϕ(x)− Rn da uzluksiz
differensiallanuvchi funksiya. Shunday
u¿(t) boshqaruvni topish kerakki,
J(u¿)=infu∈U J(u)
bo’lsin, bu yerda U– barcha joyiz boshqaruvlar to’plami. Shunday
qilib, quyidagi
(4)
terminal boshqarish masalasini qaraymiz. Bu masalada trayektoriyalarning chap
uchi mahkamlangan ((2) shartga q.), o’ng uchi esa, erkin
(x(t1)∈Rn) .
(4) masala avvalgi ma’ruzamizda qaralgan optimal boshqarish umumiy
masalasining xususiy holi bo’lib, Pontryaginning maksimum prinsipi bu masala
uchun quyidagicha bo’ladi.
1-teorema. Agar
u¿(t),t∈[t0,t1] – optimal boshqaruv, x¿(t),t∈[t0,t1] optimal
trayektoriya bo’lsa,,](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_2.png)
![H (x¿(t),ψ¿(t),u¿(t),t)= max u∈V H (x¿(t),ψ¿(t),u,t), t∈[t0,t1] (5)
maksimum sharti bajariladi, bu yerda
H (x,ψ,u,t)=ψ'f(x,u,t)=∑j=1
n
ψjfj(x,u,t),
ψ'(t),t∈[t0,t1]
funksiya
˙ψ=− ∂H (x¿(t),ψ,u¿(t),t)
∂x
(6)
ψ(t1)=−
∂ϕ(x¿(t1))
∂x
(7)
qo’shma sistemaning yechimidir.
2. Funksional orttirmasi uchun formula. Teoremaning isbotiga o’tishdan
oldin funksionalning orttirmas i uchun formula keltirib chiqaramiz.
u=u(t), ~u= u(t)+Δu (t)
, t∈[t0,t1] joyiz boshqaruvlar, x= x(t) ,
~x= x(t)+Δx (t)
, t∈[t0,t1] , ularga mos joyiz trayektoriyalar bo’lsin.
ΔJ (u)= J(~u)− J(u)
ayirmaga (3) funksionalning
u=u(t) boshqaruv bo’yicha orttirmasi deyiladi.
(3) funksionalning aniqlanishidan va
ϕ(x) funksiyaning
differensiallanuvchiligidan,
ΔJ (u)=ϕ(~x(t1))−ϕ(x(t1))=
∂ϕ'(x(t1))
∂x Δx (t1)+ο(‖Δx (t1)‖)
(8)
kelib chiqadi.
ψ=ψ(t)
ixtiyoriy differensiallanuvchi funksiya uchun o’rinli bo’lgan
quyidagi ayniyatni qaraymiz:
ψ'(t1)Δx (t1)−ψ'(t0)Δx (t0)=∫
t0
t1
˙ψ'(t)Δx (t)dt +∫t0
t1
ψ'(t)Δ˙x(t)dt
(9)
Trayektoriyalarning chap uchi mahkamlangan, ya’ni
x(t0)=~x(t0)= x0 bo’lgani
uchun,
Δx (t0)=0 .
ψ(t1)=−
∂ϕ(x(t1))
∂x
(10)](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_3.png)
![deb olamiz. (9) va (10) larni hisobga olgan holda, (8) danΔJ (u)=−∫
t0
t1
˙ψ'(t)Δx (t)dt−∫t0
t1
ψ'(t)Δ˙x(t)dt+ο(‖Δx (t1)‖)
(11)
tenglikni olamiz. (11) dagi ikkinchi integralni qaraymiz. Tushunarliki,
Δx (t0)=~x(t0)− x(t)
funksiya, quyidagi,
Δ˙x(t)= f(x(t)+Δx (t),u(t)+Δu (t),t)− f(x(t),u(t),t)
differensial tenglamani qanoatlantiradi. Shuning uchun,
H (x,ψ,u,t)=ψ'f(x,t,u) (12)
Gamilton–Pontryagin funksiyasi yordamida quyidagini yozamiz:
∫
t0
t1
ψ'(t)Δ˙x(t)dt =∫t0
t1
(H (x+Δx ,ψ,u+Δu ,t)− H (x,ψ,u,t))dt =
=∫
t0
t1
(H (x,ψ,u+Δu ,t)−H (x,ψ,u,t))dt =∫t0
t1∂H (x,ψ,u+Δu ,t)
∂x Δx (t)dt +
+∫
t0
t1
ο(‖Δx (t)‖)dt
(13)
Faraz qilaylik,
ψ=ψ(t) funksiya
˙ψ(t)=∫
t0
t1∂H (x(t),ψ(t),u(t),t)
∂x dt
(14)
qo’shma sistemaning (10) boshlang’ich shartni qanoatlantiruvchi yechimi bo’lsin.
(14) differensial tenglama chiziqli, ya’ni
˙ψ(t)=∫
t0
t1∂f(x(t),u(t),t)
∂x ψ(t)
ko’rinishda bo’lgani uchun,
ψ(t) funksiya [t0,t1] oraliqda bir qiymatli
aniqlangandir.
(13) va (14) ni (10) ga keltirib qo’yib, funksional orttirmasini quyidagicha
yozamiz:
ΔJ (u)=∫
t0
t1
Δ~uH (x(t),ψ(t),u(t),t)dt+η
(15)
bu yerda
Δ~u H (x,ψ,u,t)=H (x,ψ,~u,t)−H (x,ψ,u,t),](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_4.png)
![η=η1+η2+η3,η1=(‖Δx (t1)‖), η2=−∫
t0
t1
ο1(‖Δx (t)‖)dt ,
η3=−∫
t0
t1∂H~u'(x(t),ψ(t),u(t),t)
∂x Δx (t)dt
(16)
Hosil qilingan (15) formulaning ba’zi xususiy hollarini qarab chiqamiz.
a) Agar
ϕ(x) qavariq funksiya bo’lsa, η1≥ 0 bo’ladi; agar ϕ(x) chiziqli
funksiya bo’lsa,
η1=0 bo’ladi.
Haqiqatan ham, differensiallanuvchi
ϕ(x) funksiya
tengsizlikni qanoatlantirganligi uchun, == bajariladi. == chiziqli bo’lgan holda esa
== bo’lishi ravshan.
b) Agar (1 ) sistema x bo’yicha chiziqli bo’lsa,
η2= 0 bo’ladi. Haqiqatan
ham, agar (1) sistema
ko’rinishda bo’lsa, funksiya x bo’yicha chiziqli va
shuning uchun
ο1(‖Δ˙x‖)=0 bo’ladi.
v) Agar (1) sistema , x va u o’zgaruvchilar ajralgan, ya’ni,
˙x= f(x,t)+b(u,t)
ko’rinishda bo’lsa,
η3= 0 bo’ladi. Haqiqatan ham, bu holda
Δ~uH (x,ψ,u,t)=ψ'[b(~u,t)−b(u,t)]
. Shuning uchun, ∂Δ~uH /∂x=0 .
Agar
masalada
ϕ(x) qavariq funksiya bo’lsa, yuqoridagi a), b), v) natijalarga ko’ra, (15)
formula,](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_5.png)
![(20)
(21 )Δx (t0)=0
bo’lgani uchun Δθvε x(t0)≡0, t0≤ t≤θ funksiya (50) tenglamaning
[t0,θ]
oraliqdan yagona yechimidir. Shunday qilib, (21) tenglama uchun
boshlang’ich shart
Δθvε x(θ)=0, bo’ladi. Shuning uchun (21) tenglama integral
tenglama shaklida quyidagicha yoziladi:
(22)
f(x,u,t)
funksiyaning x(t) trayektoriya biror Δ – atrofidagi Lipshis
o’zgarmasi
L= L(Δ) bo’lsin, ya’ni
(2 3 )
tengsizlik bajarilsin. U vaqtda (22) tenglamadan
(24)
kelib chiqadi, bu yerda
Δvf(x,u,τ)= f(x,v,τ)− f(x,u,τ) .
(1) tenglamaning o’ng tomoniga qo’yilgan shartlardan va
x(t)
trayektoriyaning uzluksizligidan kelib chiqadiki, yetarlicha kichik
ε>0
uchun
L o’zgarmas ε ga bog’liq bo’lmaydi.
Quyidagi
(25)
belgilashlardan foydalansak, (24) tengsizlik ko’rinishda yoziladi. Bu yerdan,](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_7.png)
![(26)
kelib chiqadi. (24) belgilashni hisobga olib, (25) tengsizlikdan ‖Δx (t)‖≤(∫
θ
t
‖Δvf(x,u,τ)‖dτ)eL(t−θ)
tengsizlikni olamiz. Bu yerdan
(2 7 )
kelib chiqadi.
Δvf(x(t),u(t),t) funksiya faqat v va t ga bog’liq va t bo’yicha bo’lakli
uzluksiz bo’lgani uchun,
(28)
mavjud. Shunday qilib, (26) va (27) dan
(29)
kelib chiqadi, bu yerda
k1=k(v)eLε .
Yendi
Δθvε x(t) funksiyani [θ+ε,t1] oraliqda qaraymiz. Bu yerda u (20)
tenglamani va (29) ga ko’ra ,
(30)
boshlang’ich shartni qanoatlantiradi. Soddalik uchun,(22) dagi L Lipshis
o’zgarmasidan foydalanib va (19) ni integral shaklda yozib, quyidagiga yega
bo’lamiz:
‖Δx (t)‖≤‖x(θ+ε)‖+∫
θ+ε
t
‖f(x+Δx ,u,τ)− f(x,u,τ)‖dτ ≤k1ε+L∫
θ+ε
t
‖Δx (τ)‖dτ
Bu ham (24) ga o’xshash tengsizlikdir. Shuning uchun, bu yerda ham (26)
tipidagi tengsizlik o’rinli. Demak,](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_8.png)
![.
Bu yerdan
(31)
tengsizlikni olamiz, bunda k2= k(V )L(t−θ) o’zgarmas ε ga bog’liq emas.
k=k(V)L(t1−t0)
bo’lsin. k1<k, k2<k ekanligi ravshan. U vaqtda Δθvε x(t)≡0
t∈[t0,θ]
, (29), (31) munosabatlarni birlashtirib, [t0,t1] oraliqda x(t)
trayektoriyaning “ignasimon” variatsiyasiga mos orttirmasi,
( 3 2 )
kabi baholanishini ko’ramiz, bu yerda k o’zgarmas ε ga bog’liq emas.
5. Maksimum prinsipining isboti. Endi 1-teorema isbotini keltiramiz.
u¿(t)
t∈[t0,t1]
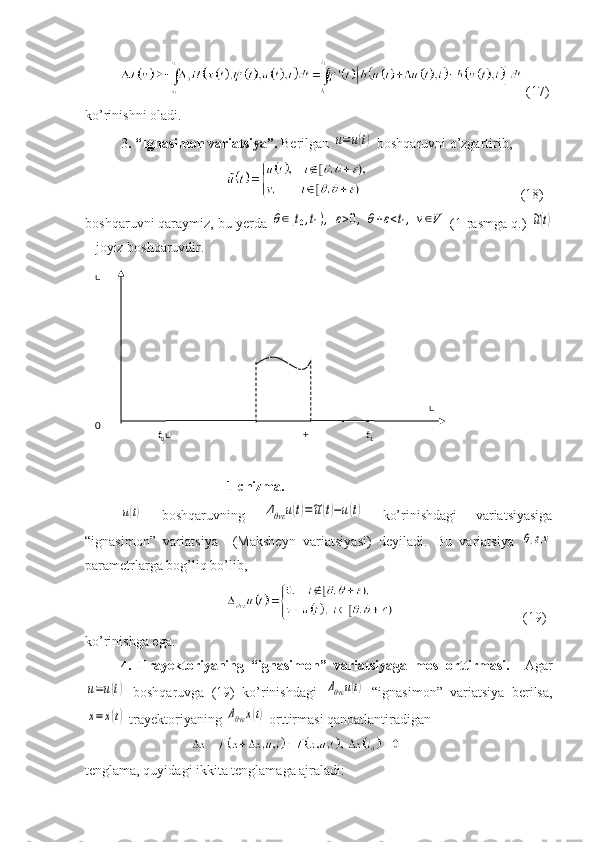
optimal boshqaruvning (18) ko’rinishdagi ignasimon variatsiyasidan
foydalanamiz, ya’ni
ko’rinishdagi joyiz boshqar uv larni qaraymiz, bu yerda
θ∈[t0,t1], θ+ε<t1, ε>0, v∈V
. U vaqtda,
(33)
funksionalning orttirmasi uchun hosil qilingan (14) formulaga ko’ra, (33)
munosabat,
(3 4 )
ko’rinishida yoziladi, bu yerda
(35)](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_9.png)
![(32) munosabatni hisobga olsak, (35) dan ηθvε = ο2(ε) ekanligi kelib chiqadi.
ΔVH (x¿(t),ψ¿(t),u¿(t),t)
funksiya t=θ nuqtada o’ngdan uzluksiz bo’lganligi uchun,
(36)
tenglik bajariadi. Shunday qilib, (36) ni hisobga olgan holda, (35) dan
(37)
munosabatni olamiz
(ο4(ε)= ο2(ε)+ο3(ε)) . (37) ni ε>0 songa bo’lib va ε→ 0 da
limitga o’tib,
tengsizlikni olamiz, ya’ni
. (38)
Bu munosabat (4) tenglikning
θ∈[t0,t1] nuqtada o ’ rinli ekanligini bildiradi . u¿(t)
boshqarishni
θ=t1 nuqtada uzluksiz deb hisoblash mumkin . U vaqtda (38)
munosabatda
θ→ t1 da limitga o ’ tsak , uning θ=t1 nuqtada ham o ’ rinli ekanligini
ko ’ ramiz . Teorema isbotlandi.
6. Ekstremal boshqaruvlar. Agar
x= x(t) , ψ=ψ(t) , u=u(t) , funksiyalar
[t0,t1]
oraliqda asosiy va qo’shma sistemani hamda maksimum shartini
qanoatlantirsa, ya’ni
(38)
(39)
(40)
munosabatlar bajarilsa,
u(t) joyiz boshqaruvga ekstremal boshqaruv deyiladi.
Maksimum prinsipi optimallikning zaruriy shartidan iborat, ya’ni ekstremal
boshqaruvlar orasida optimal bo’lmaganlari ham topiladi.](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_10.png)
![1-misol.
(41)
Bu masala (4) ko’rinishdagi terminal boshqarish masalasidir: f=(f1,f2) ,
f1= u, f2=− x12, x0=(0,0 ),t0=0,t1=1, ϕ(x)= x2, x=(x1,x2)
.
Gamilton-Pontryagin funksiyasini tuzamiz:
.
Qo’shma sistemani tuzamiz:
Bu sistemaning
shartlarni qanoatlantiruvchi yech i mi,
ψ2(t)=−1, t∈[0,1 ], ψ1(t)=−2∫
1
t
x2(τ)dτ
bo’ladi. Qaralayotgan masala uchun (4) maksimum sharti,
ψ1(t)u(t)=max
|u|≤1
ψ1(t)u
ko’rinishga keladi. Demak, har bir
(42)
joyiz boshqaruv – ekstremal boshqaruv bo’ladi.](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_11.png)
![(43)
ko’rinishdagi boshqaruv ham ekstremal boshqaruv bo’ladi, chunki unga mos
keluvchi trayektoriyaning birinchi komponentasi
bo’lib,
,
ya’ni (42) shart bajariladi. (43) boshqaruv ekstremal boshqaruv bo’lsa-da, optimal
boshqaruv emas. Haqiqatan ham, ⃗u(t)≡1,t∈[0,1 ] joyiz boshqaruv uchun J(¯u)=− 1
3,
(43) uchun esa,
J(u)=− 1
27 , ya’ni J(¯u)<J(u) .
Ekstremal boshqaruvlarning muhim xossalarini quyidagi teoremada keltiramiz.
2-teorema.
u(t) t∈[t0,t1] – ekstremal boshqaruv bo’lsin. U vaqtda:
1)
H(x(t),ψ(t),u(t),t) funksiya t∈[t0,t1] oraliqda uzluksiz;
2)
u(t) ning har bir t∈[t0,t1] uzluksizlik nuqtasi da
(44)
tenglik bajariladi.
Isboti. Teoremaning birinchi tasdig’i isbotini keltiramiz. (40) munosabatga
ko’ra, t va
¯t= t+Δt vaqt momentlari uchun,
tengsizliklar bajariladi. Bu yerdan,
(45)](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_12.png)
![Olingan (45) tengsizlikning chap va o’ng tomonlari Δt → 0 da nolga intiladi.
Demak,
H (¯t)→ H (t) , Δt → 0 . Bu esa, H(t) funksiyaning ixtiyoriy t∈[t0,t1] nuqtada
uzluksizligini ko’rsatadi.
Teoremaning ikkinchi tasdig’i isbotini adabiyotlardan ([6] dan) qarash
mumkin.
7. Chiziqli terminal boshqarish masalasi. Chiziqli boshqarish masalasi
uchun chiziqli terminal kriteriyli quyidagi masalani qaraymiz:
(46)
bu yerda
x∈Rn, u∈Rm, V ⊂Rn, A(t)− n×n− matrisa-funksiya,
b(t,u)=(b1(t,u),...,bm(t,u))
, c∈Rn, x0∈Rn .
A(t) matrisaning elementlari
[t0,t1] da uzluksiz, bi(t,u),i=1,n ,funksiyalar
[t0,t1]×V
da uzluksiz deb faraz qilamiz.
(46) masala uchun quyidagi teorema o’rinlidir
3-teorema.
u= u(t), t∈[t0,t1] bo’lakli-uzluksiz funksiyaning (46)
masalada optimal boshqaruv bo’lishi uchun,
(47)
shartning bajarilishi zarur va yetarlidir, bu yerda
ψ(t),t∈[t0,t1] funksiya
(48)
qo’shma sistemaning yechimidan iborat.
Isboti.
H (x,ψ,u,t)=ψ1[A(t)x+b(t,u)] Gamilton-Pontryagin funksiyasi
yordamida (47) shartni (40) maksimum sharti ko’rinishida yozish mumkin. (48)
sistema esa, (39) ko’rinishda yoziladi. Demak, (47) shartning zaruriyligi 1-
teoremadan kelib chiqadi. Shu shartning
u(t) optimal boshqaruv bo’lishi uchun](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_13.png)
![yetarliligi (16) munosabatdan kelib chiqadi, chunki ixtiyoriy ~u= y(t) joyiz
boshqaruv uchun,
bajariladi. Teorema isbotlandi.
2-misol.
J(u)=x1(1)+x2(1)→min,
˙x1=x2,˙x2=x1+u,
x1(0)= x2(0)=0,|u|≤1,t∈[0,1 ].
Bu masala (46) ko’rinishdagi masaladir:
x=(x1,x2),A=(¿
01
)00
¿
),b(t,u)=(b1(t,u),b2(t,u)),b1(t,u)=0,¿b2(t,u)=u,c=(c1,c2)=(1,1),V=[−1,1].¿¿
(47) maksimum sharti,
max
v∈V
ψ¿(t)b(t,v)= max
v∈V
ψ2(t)u(t)=ψ2(t)u(t)
ko’rinishda bo’ladi, bu yerda
ψ(t)=(ψ1(t),ψ2(t))
ψ1(t)=−ψ2,ψ2=−ψ1(1)=−1,ψ2(1)=−1
qo’shma sistema yechimidan iborat. Demak, optimal boshqaruv
u(t)= sign ψ2(t),t∈[0,1 ]
ko’rinishda bo’ladi. Qo’shma sistemaning yechimi
ψ
¿1(t)=− e1−t, ψ
¿2(t)=−e1−t
bo’ladi. Shunday qilib, optimal boshqarish
u¿(t)= sign ψ¿2= sign (−e1−t)=−1, t∈[0,1 ]
formula bilan aniqlanadi. Optimal trayektoriya esa,
˙x1= x2, ˙x2+u¿(t)
sistemaning
x1(0)= x2(0)=0 shartni qanoatlantiruvchi yechimidan iborat. Bu
sistemani yechib,
x1
¿(t)=1− 1
2et− 1
2e−t, x1
¿(t)=− 1
2et− 1
2e−t
optimal trayektoriyani topamiz. Funksionalning minimal qiymati](/data/documents/75f5b8c2-026f-4a9e-95b9-748d0ac65e6e/page_14.png)

Terminal boshqarish masalasi u ch un maksimum prin s ipi. Reja 1.Terminal boshqarish masalasining qo’yilishi. Maksimum prinsipi. 2. Funksional orttirmasi uchun formula. 3. “ Ignasimon” variasiya. Trayektoriya bahosini aniqlash. 4. Maksimum prinsipining isboti. 5. Ekstremal boshqaruvlar. 6. Chiziqli terminal boshqarish masalasi.
1. Terminal boshqarish masalasi. Maksimum prinsipi. Boshqarish obyekti (1) vektorli differensial tenglama bilan berilgan bo’lsin, bu yerdax=(x1,...,xn),u=(u1,...,um), f=(f1,...,fn), fi(x,u,t) funksiyalarni fixj(x,u,t) hususiy hosilalari bilan birga uzluksiz deb hisoblaymiz. Joyiz boshqarishlar [t0,t1] oraliqda aniqlangan bo’lakli uzluksiz va V ⊂Rm to’plamdan qiymatlar qabul qiluvchi u=u(t) m– vektor funksiyalardan iborat. (1) tenglamaning har bir u=u(t) joyiz boshqarishga mos x= x(t) joyiz trayektoriyasi (2) shartni qanoatlantiradi. Qaralayotgan obyektni boshqarish (3) terminal kriteriy orqali sifat jihatidan baholanadi, bu yerda ϕ(x)− Rn da uzluksiz differensiallanuvchi funksiya. Shunday u¿(t) boshqaruvni topish kerakki, J(u¿)=infu∈U J(u) bo’lsin, bu yerda U– barcha joyiz boshqaruvlar to’plami. Shunday qilib, quyidagi (4) terminal boshqarish masalasini qaraymiz. Bu masalada trayektoriyalarning chap uchi mahkamlangan ((2) shartga q.), o’ng uchi esa, erkin (x(t1)∈Rn) . (4) masala avvalgi ma’ruzamizda qaralgan optimal boshqarish umumiy masalasining xususiy holi bo’lib, Pontryaginning maksimum prinsipi bu masala uchun quyidagicha bo’ladi. 1-teorema. Agar u¿(t),t∈[t0,t1] – optimal boshqaruv, x¿(t),t∈[t0,t1] optimal trayektoriya bo’lsa,,
H (x¿(t),ψ¿(t),u¿(t),t)= max u∈V H (x¿(t),ψ¿(t),u,t), t∈[t0,t1] (5) maksimum sharti bajariladi, bu yerda H (x,ψ,u,t)=ψ'f(x,u,t)=∑j=1 n ψjfj(x,u,t), ψ'(t),t∈[t0,t1] funksiya ˙ψ=− ∂H (x¿(t),ψ,u¿(t),t) ∂x (6) ψ(t1)=− ∂ϕ(x¿(t1)) ∂x (7) qo’shma sistemaning yechimidir. 2. Funksional orttirmasi uchun formula. Teoremaning isbotiga o’tishdan oldin funksionalning orttirmas i uchun formula keltirib chiqaramiz. u=u(t), ~u= u(t)+Δu (t) , t∈[t0,t1] joyiz boshqaruvlar, x= x(t) , ~x= x(t)+Δx (t) , t∈[t0,t1] , ularga mos joyiz trayektoriyalar bo’lsin. ΔJ (u)= J(~u)− J(u) ayirmaga (3) funksionalning u=u(t) boshqaruv bo’yicha orttirmasi deyiladi. (3) funksionalning aniqlanishidan va ϕ(x) funksiyaning differensiallanuvchiligidan, ΔJ (u)=ϕ(~x(t1))−ϕ(x(t1))= ∂ϕ'(x(t1)) ∂x Δx (t1)+ο(‖Δx (t1)‖) (8) kelib chiqadi. ψ=ψ(t) ixtiyoriy differensiallanuvchi funksiya uchun o’rinli bo’lgan quyidagi ayniyatni qaraymiz: ψ'(t1)Δx (t1)−ψ'(t0)Δx (t0)=∫ t0 t1 ˙ψ'(t)Δx (t)dt +∫t0 t1 ψ'(t)Δ˙x(t)dt (9) Trayektoriyalarning chap uchi mahkamlangan, ya’ni x(t0)=~x(t0)= x0 bo’lgani uchun, Δx (t0)=0 . ψ(t1)=− ∂ϕ(x(t1)) ∂x (10)
deb olamiz. (9) va (10) larni hisobga olgan holda, (8) danΔJ (u)=−∫ t0 t1 ˙ψ'(t)Δx (t)dt−∫t0 t1 ψ'(t)Δ˙x(t)dt+ο(‖Δx (t1)‖) (11) tenglikni olamiz. (11) dagi ikkinchi integralni qaraymiz. Tushunarliki, Δx (t0)=~x(t0)− x(t) funksiya, quyidagi, Δ˙x(t)= f(x(t)+Δx (t),u(t)+Δu (t),t)− f(x(t),u(t),t) differensial tenglamani qanoatlantiradi. Shuning uchun, H (x,ψ,u,t)=ψ'f(x,t,u) (12) Gamilton–Pontryagin funksiyasi yordamida quyidagini yozamiz: ∫ t0 t1 ψ'(t)Δ˙x(t)dt =∫t0 t1 (H (x+Δx ,ψ,u+Δu ,t)− H (x,ψ,u,t))dt = =∫ t0 t1 (H (x,ψ,u+Δu ,t)−H (x,ψ,u,t))dt =∫t0 t1∂H (x,ψ,u+Δu ,t) ∂x Δx (t)dt + +∫ t0 t1 ο(‖Δx (t)‖)dt (13) Faraz qilaylik, ψ=ψ(t) funksiya ˙ψ(t)=∫ t0 t1∂H (x(t),ψ(t),u(t),t) ∂x dt (14) qo’shma sistemaning (10) boshlang’ich shartni qanoatlantiruvchi yechimi bo’lsin. (14) differensial tenglama chiziqli, ya’ni ˙ψ(t)=∫ t0 t1∂f(x(t),u(t),t) ∂x ψ(t) ko’rinishda bo’lgani uchun, ψ(t) funksiya [t0,t1] oraliqda bir qiymatli aniqlangandir. (13) va (14) ni (10) ga keltirib qo’yib, funksional orttirmasini quyidagicha yozamiz: ΔJ (u)=∫ t0 t1 Δ~uH (x(t),ψ(t),u(t),t)dt+η (15) bu yerda Δ~u H (x,ψ,u,t)=H (x,ψ,~u,t)−H (x,ψ,u,t),
η=η1+η2+η3,η1=(‖Δx (t1)‖), η2=−∫ t0 t1 ο1(‖Δx (t)‖)dt , η3=−∫ t0 t1∂H~u'(x(t),ψ(t),u(t),t) ∂x Δx (t)dt (16) Hosil qilingan (15) formulaning ba’zi xususiy hollarini qarab chiqamiz. a) Agar ϕ(x) qavariq funksiya bo’lsa, η1≥ 0 bo’ladi; agar ϕ(x) chiziqli funksiya bo’lsa, η1=0 bo’ladi. Haqiqatan ham, differensiallanuvchi ϕ(x) funksiya tengsizlikni qanoatlantirganligi uchun, == bajariladi. == chiziqli bo’lgan holda esa == bo’lishi ravshan. b) Agar (1 ) sistema x bo’yicha chiziqli bo’lsa, η2= 0 bo’ladi. Haqiqatan ham, agar (1) sistema ko’rinishda bo’lsa, funksiya x bo’yicha chiziqli va shuning uchun ο1(‖Δ˙x‖)=0 bo’ladi. v) Agar (1) sistema , x va u o’zgaruvchilar ajralgan, ya’ni, ˙x= f(x,t)+b(u,t) ko’rinishda bo’lsa, η3= 0 bo’ladi. Haqiqatan ham, bu holda Δ~uH (x,ψ,u,t)=ψ'[b(~u,t)−b(u,t)] . Shuning uchun, ∂Δ~uH /∂x=0 . Agar masalada ϕ(x) qavariq funksiya bo’lsa, yuqoridagi a), b), v) natijalarga ko’ra, (15) formula,